#include <stdio.h>
#include <string.h>
#include <sys/types.h>
#include <errno.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <termios.h>
#include <stdlib.h>
#include <linux/serial.h>
/* 用到这2个ioctl: TIOCGRS485, TIOCSRS485 */
#include <sys/ioctl.h>
/* set_opt(fd,115200,8,‘N’,1) */
int set_opt(int fd,int nSpeed, int nBits, char nEvent, int nStop)
{
struct termios newtio,oldtio;
if ( tcgetattr( fd,&oldtio) != 0) {
perror("SetupSerial 1");
return -1;
}
bzero( &newtio, sizeof( newtio ) );
newtio.c_cflag |= CLOCAL | CREAD;
newtio.c_cflag &= ~CSIZE;
newtio.c_lflag &= ~(ICANON | ECHO | ECHOE | ISIG); /*Input*/
newtio.c_oflag &= ~OPOST; /*Output*/
switch( nBits )
{
case 7:
newtio.c_cflag |= CS7;
break;
case 8:
newtio.c_cflag |= CS8;
break;
}
switch( nEvent )
{
case 'O':
newtio.c_cflag |= PARENB;
newtio.c_cflag |= PARODD;
newtio.c_iflag |= (INPCK | ISTRIP);
break;
case 'E':
newtio.c_iflag |= (INPCK | ISTRIP);
newtio.c_cflag |= PARENB;
newtio.c_cflag &= ~PARODD;
break;
case 'N':
newtio.c_cflag &= ~PARENB;
break;
}
switch( nSpeed )
{
case 2400:
cfsetispeed(&newtio, B2400);
cfsetospeed(&newtio, B2400);
break;
case 4800:
cfsetispeed(&newtio, B4800);
cfsetospeed(&newtio, B4800);
break;
case 9600:
cfsetispeed(&newtio, B9600);
cfsetospeed(&newtio, B9600);
break;
case 115200:
cfsetispeed(&newtio, B115200);
cfsetospeed(&newtio, B115200);
break;
default:
cfsetispeed(&newtio, B9600);
cfsetospeed(&newtio, B9600);
break;
}
if( nStop == 1 )
newtio.c_cflag &= ~CSTOPB;
else if ( nStop == 2 )
newtio.c_cflag |= CSTOPB;
newtio.c_cc[VMIN] = 1; /* 读数据时的最小字节数: 没读到这些数据我就不返回! */
newtio.c_cc[VTIME] = 0; /* 等待第1个数据的时间:
* 比如VMIN设为10表示至少读到10个数据才返回,
* 但是没有数据总不能一直等吧? 可以设置VTIME(单位是10秒)
* 假设VTIME=1,表示:
* 10秒内一个数据都没有的话就返回
* 如果10秒内至少读到了1个字节,那就继续等待,完全读到VMIN个数据再返回
*/
tcflush(fd,TCIFLUSH);
if((tcsetattr(fd,TCSANOW,&newtio))!=0)
{
perror("com set error");
return -1;
}
//printf("set done!\n");
return 0;
}
int open_port(char *com)
{
int fd;
struct serial_rs485 rs485conf;
//fd = open(com, O_RDWR|O_NOCTTY|O_NDELAY);
fd = open(com, O_RDWR|O_NOCTTY);
if (-1 == fd){
return(-1);
}
/* 读取rs485conf */
if (ioctl (fd, TIOCGRS485, &rs485conf) < 0) {
/* 处理错误 */
}
/* 使能RS485模式 */
rs485conf.flags |= SER_RS485_ENABLED;
/* 当发送数据时, RTS为1 */
rs485conf.flags |= SER_RS485_RTS_ON_SEND;
/* 或者: 当发送数据时, RTS为0 */
//rs485conf.flags &= ~(SER_RS485_RTS_ON_SEND);
/* 当发送完数据后, RTS为1 */
rs485conf.flags |= SER_RS485_RTS_AFTER_SEND;
/* 或者: 当发送完数据后, RTS为0 */
//rs485conf.flags &= ~(SER_RS485_RTS_AFTER_SEND);
/* 还可以设置:
* 发送数据之前先设置RTS信号, 等待一会再发送数据
* 等多久? delay_rts_before_send(单位ms)
*/
rs485conf.delay_rts_before_send = 0X00000004;
/* 还可以设置:
* 发送数据之后, 等待一会再清除RTS信号
* 等多久? delay_rts_after_send(单位ms)
*/
rs485conf.delay_rts_after_send = 0X00000004;
/* 如果想在发送RS485数据的同时也接收数据, 还可以这样设置 */
rs485conf.flags |= SER_RS485_RX_DURING_TX;
if (ioctl (fd, TIOCSRS485, &rs485conf) < 0) {
/* 处理错误 */
}
/* 使用read()和write()就可以读、写数据了 */
/* 关闭设备 */
// if (close (fd) < 0) {
/* 处理错误 */
// }
if(fcntl(fd, F_SETFL, 0)<0) /* 设置串口为阻塞状态*/
{
printf("fcntl failed!\n");
return -1;
}
return fd;
}
/*
-
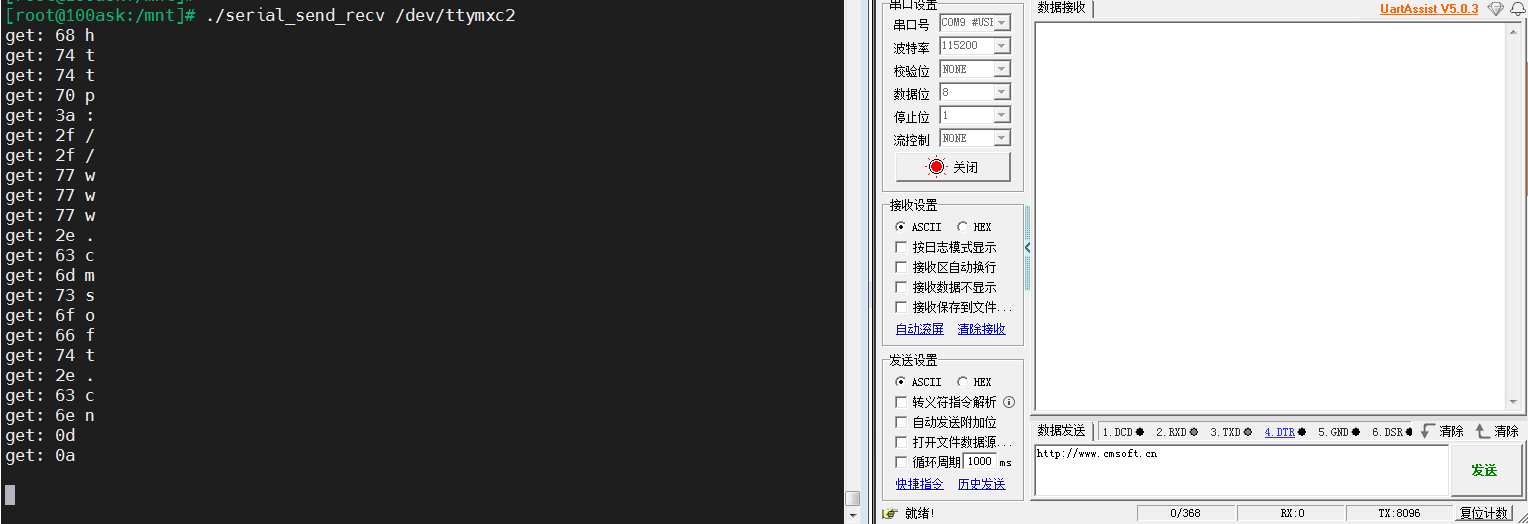
./serial_send_recv
*/
int main(int argc, char **argv)
{
int fd;
int iRet;
char c;/* 1. open */
/* 2. setup
- 115200,8N1
- RAW mode
- return data immediately
*/
/* 3. write and read */
if (argc != 2)
{
printf(“Usage: \n”);
printf("%s </dev/ttySAC1 or other>\n", argv[0]);
return -1;
}fd = open_port(argv[1]);
if (fd < 0)
{
printf(“open %s err!\n”, argv[1]);
return -1;
}iRet = set_opt(fd, 115200, 8, ‘N’, 1);
if (iRet)
{
printf(“set port err!\n”);
return -1;
}//printf(“Enter a char: “);
while (1)
{
//scanf(”%c”, &c);
//iRet = write(fd, &c, 1);
iRet = read(fd, &c, 1);
if (iRet == 1)
{
printf(“get: %02x %c\n”, c, c);
iRet = write(fd, &c, 1);
}
else
printf(“can not get data\n”);
}return 0;
}