MIPI摄像头适配指南
- GC2053 Dataset:100ASK-gc2053_ds.zip
0.前言
DongshanPI-AICT开发板支持4LINE的MIPI摄像头和2LINE的MIPI摄像头,使用百问网提供的Tina SDK包生成的镜像,系统已经配置好了,可以直接使用。本章介绍如何去适配一个MIPI摄像头,本文所用的2LINE的MIPI摄像头,大家可以在百问网官方淘宝店铺上购买。
全志Linux Tina-SDK开发完全手册:https://tina.100ask.net/
如果您想适配自己的摄像头,强烈建议您参照以下开发指南进行操作:
Camera_开发指南:概述 - 全志Linux Tina-SDK开发完全手册
1.VIN框架介绍
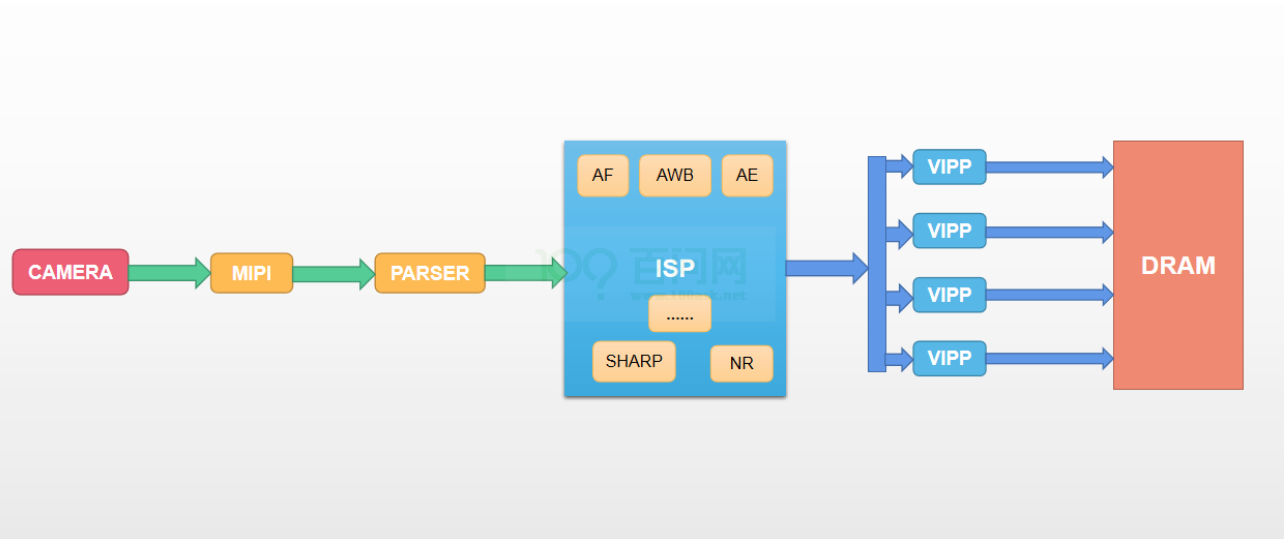
V853支持并口CSI、MIPI,使用VIN camera驱动框架。
Camera 通路框架
• VIN 支持灵活配置单/双路输入双ISP 多通路输出的规格
• 引入media 框架实现pipeline 管理
• 将libisp 移植到用户空间解决GPL 问题
• 将统计buffer 独立为v4l2 subdev
• 将的scaler(vipp)模块独立为v4l2 subdev
• 将video buffer 修改为mplane 方式,使用户层取图更方便
• 采用v4l2-event 实现事件管理
• 采用v4l2-controls 新特性
VIN 框架
• 使用过程中可简单的看成是vin 模块+ device 模块+af driver + flash 控制模块的方式;
• vin.c 是驱动的主要功能实现,包括注册/注销、参数读取、与v4l2 上层接口、与各device 的下层接口、中断处理、buffer 申请切换等;
• modules/sensor 文件夹里面是各个sensor 的器件层实现,一般包括上下电、初始化,各分辨率切换,yuv sensor 包括绝大部分的v4l2 定义的ioctrl 命令的实
现;而raw sensor 的话大部分ioctrl 命令在vin 层调用isp 库实现,少数如曝光/增益调节会透过vin 层到实际器件层;
• modules/actuator 文件夹内是各种vcm 的驱动;
• modules/flash 文件夹内是闪光灯控制接口实现;
• vin-csi 和vin-mipi 为对csi 接口和mipi 接口的控制文件;
• vin-isp 文件夹为isp 的库操作文件;
• vin-video 文件夹内主要是video 设备操作文件;
驱动路径位于linux-4.9/drivers/media/platform/sunxi-vin 下。
sunxi-vin:
│ vin.c ;v4l2驱动实现主体(包含视频接口和ISP部分)
│ vin.h ;v4l2驱动头文件
│ top_reg.c ;vin对各v4l2 subdev管理接口实现主体
│ top_reg.h ;管理接口头文件
│ top_reg_i.h ;vin模块接口层部分结构体
├── modules
│ ├── actuator ;vcm driver
│ │ ├── actuator.c
│ │ ├── actuator.h
│ │ ├── dw9714_act.c
│ │ ├── Makefile
│ ├── flash ;闪光灯driver
│ │ ├── flash.c
│ │ └── flash.h
│ └── sensor ;sensor driver
│ ├── ar0144_mipi.c
│ ├── camera_cfg.h ;camera ioctl扩展命令头文件
│ ├── camera.h ;camera公用结构体头文件
│ ├── Makefile
│ ├── ov2775_mipi.c
│ ├── ov5640.c
│ ├── sensor-compat-ioctl32.c
│ ├── sensor_helper.c ;sensor公用操作接口函数文件
│ ├── sensor_helper.h
├── platform ;平台相关的配置接口
├── utility
│ ├── bsp_common.c
│ ├── bsp_common.h
│ ├── cfg_op.c
│ ├── cfg_op.h
│ ├── config.c
│ ├── config.h
│ ├── sensor_info.c
│ ├── sensor_info.h
│ ├── vin_io.h
│ ├── vin_os.c
│ ├── vin_os.h
│ ├── vin_supply.c
│ └── vin_supply.h
├── vin-cci
│ ├── sunxi_cci.c
│ └── sunxi_cci.h
├── vin-csi
│ ├── parser_reg.c
│ ├── parser_reg.h
│ ├── parser_reg_i.h
│ ├── sunxi_csi.c
│ └── sunxi_csi.h
├── vin-isp
│ ├── sunxi_isp.c
│ └── sunxi_isp.h
├── vin-mipi
│ ├── sunxi_mipi.c
│ └── sunxi_mipi.h
├── vin-stat
│ ├── vin_h3a.c
│ ├── vin_h3a.h
│ ├── vin_ispstat.c
│ └── vin_ispstat.h
├── vin_test
├── vin-video
│ ├── vin_core.c
│ ├── vin_core.h
│ ├── vin_video.c
│ └── vin_video.h
└── vin-vipp
├── sunxi_scaler.c
├── sunxi_scaler.h
├── vipp_reg.c
├── vipp_reg.h
└── vipp_reg_i.h
2.驱动配置
DongshanPI-AICT开发板支持4LINE双摄镜头模组和2LINE单摄镜头模组,下面我仅演示2LINE的MIPI摄像头如何进行配置。我们使用的是GC2053摄像头,使用的是全志已经内置的驱动程序,路径为:
kernel/linux-4.9/drivers/media/platform/sunxi-vin/modules/sensor/gc2053_mipi.c
3.设备树配置
设备树配置路径:
device/config/chips/v853/configs/100ask/board.dts
camera相关配置:
vind0:vind@0 {
vind0_clk = <300000000>;
status = "okay";
csi2:csi@2 {
pinctrl-names = "default","sleep";
pinctrl-0 = <&ncsi_pins_a>;
pinctrl-1 = <&ncsi_pins_b>;
status = "okay";
};
/*Online mode tp9953 uses online mode*/
tdm0:tdm@0 {
work_mode = <0>;
};
isp00:isp@0 {
work_mode = <0>;
};
scaler00:scaler@0 {
work_mode = <0>;
};
scaler10:scaler@4 {
work_mode = <0>;
};
scaler20:scaler@8 {
work_mode = <0>;
};
scaler30:scaler@12 {
work_mode = <0>;
};
actuator0:actuator@0 {
device_type = "actuator0";
actuator0_name = "ad5820_act";
actuator0_slave = <0x18>;
actuator0_af_pwdn = <>;
actuator0_afvdd = "afvcc-csi";
actuator0_afvdd_vol = <2800000>;
status = "disabled";
};
flash0:flash@0 {
device_type = "flash0";
flash0_type = <2>;
flash0_en = <>;
flash0_mode = <>;
flash0_flvdd = "";
flash0_flvdd_vol = <>;
status = "disabled";
};
sensor0:sensor@0 {
device_type = "sensor0";
sensor0_mname = "gc2053_mipi";
sensor0_twi_cci_id = <1>;
sensor0_twi_addr = <0x6e>;
sensor0_mclk_id = <0>;
sensor0_pos = "rear";
sensor0_isp_used = <1>;
sensor0_fmt = <1>;
sensor0_stby_mode = <0>;
sensor0_vflip = <0>;
sensor0_hflip = <0>;
sensor0_iovdd-supply = <®_aldo2>;
sensor0_iovdd_vol = <1800000>;
sensor0_avdd-supply = <®_bldo2>;
sensor0_avdd_vol = <2800000>;
sensor0_dvdd-supply = <®_dldo2>;
sensor0_dvdd_vol = <1200000>;
sensor0_power_en = <>;
sensor0_reset = <&pio PA 18 1 0 1 0>;
sensor0_pwdn = <&pio PA 19 1 0 1 0>;
sensor0_sm_hs = <>;
sensor0_sm_vs = <>;
flash_handle = <&flash0>;
act_handle = <&actuator0>;
status = "okay";
};
sensor1:sensor@1 {
device_type = "sensor1";
sensor1_mname = "tp9953";
sensor1_twi_cci_id = <0>;
sensor1_twi_addr = <0x88>;
sensor1_mclk_id = <2>;
sensor1_pos = "front";
sensor1_isp_used = <0>;
sensor1_fmt = <0>;
sensor1_stby_mode = <0>;
sensor1_vflip = <0>;
sensor1_hflip = <0>;
sensor1_iovdd-supply = <®_aldo2>;
sensor1_iovdd_vol = <1800000>;
sensor1_avdd-supply = <>; /*<®_dcdc1>;*/
sensor1_avdd_vol = <3300000>;
sensor1_dvdd-supply = <>;//<®_dldo2>;
sensor1_dvdd_vol = <1200000>;
sensor1_power_en = <&pio PI 0 1 0 1 0>;
sensor1_reset = <&pio PH 13 1 0 1 0>;
sensor1_pwdn = <>;
/*sensor1_pwdn = <&pio PE 13 1 0 1 0>;*/
sensor1_sm_hs = <>;
sensor1_sm_vs = <>;
flash_handle = <>;
act_handle = <>;
status = "okay";
};
4.内核配置
在Tina根目录下执行make kernel_menuconfig
book@100ask:~/workspaces/tina-v853-open$ make kernel_menuconfig
注意:在进行内核配置前需要配置环境变量才可以进入内核调试,即在配置前输入
book@100ask:~/workspaces/tina-v853-open$ source build/envsetup.sh
...
book@100ask:~/workspaces/tina-v853-open$ lunch
... 输入1,选择方案1
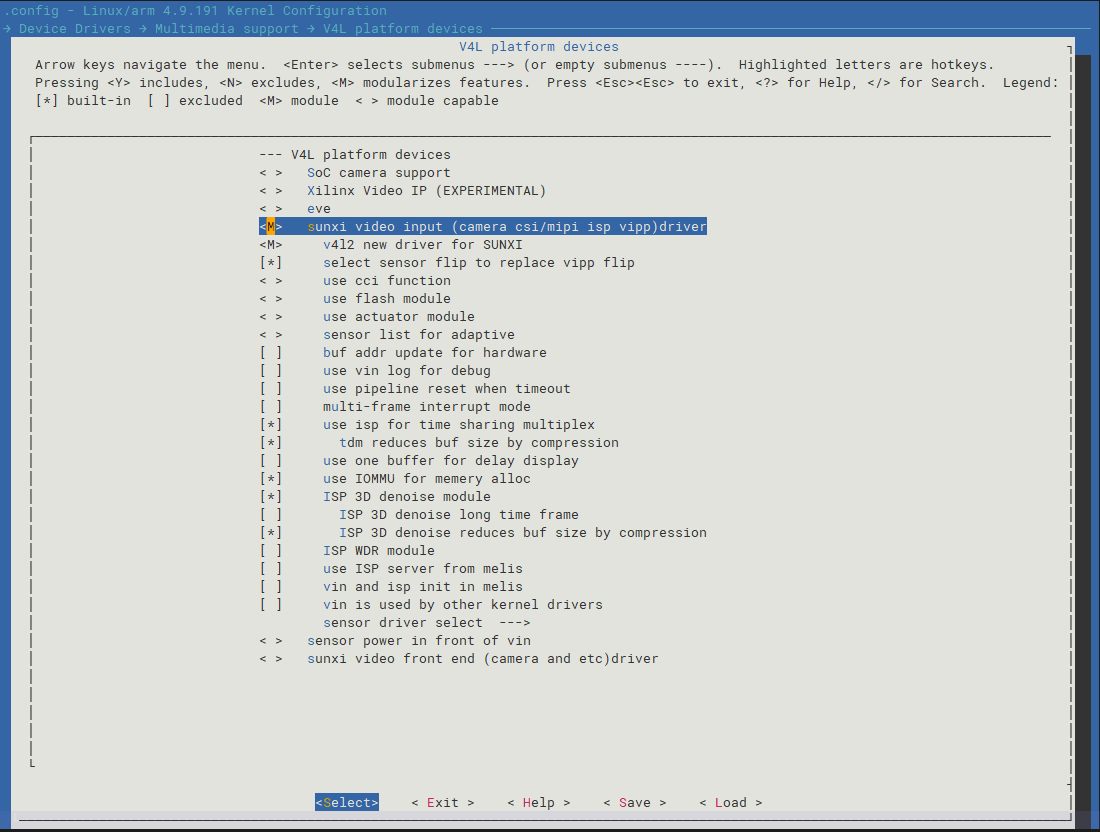
在内核配置界面中,进入如下目录,输入M选中下面两项。
→ Device Drivers
→ Multimedia support
→ V4L platform devices
<M> sunxi video input (camera csi/mipi isp vipp)driver
<M> v4l2 new driver for SUNXI
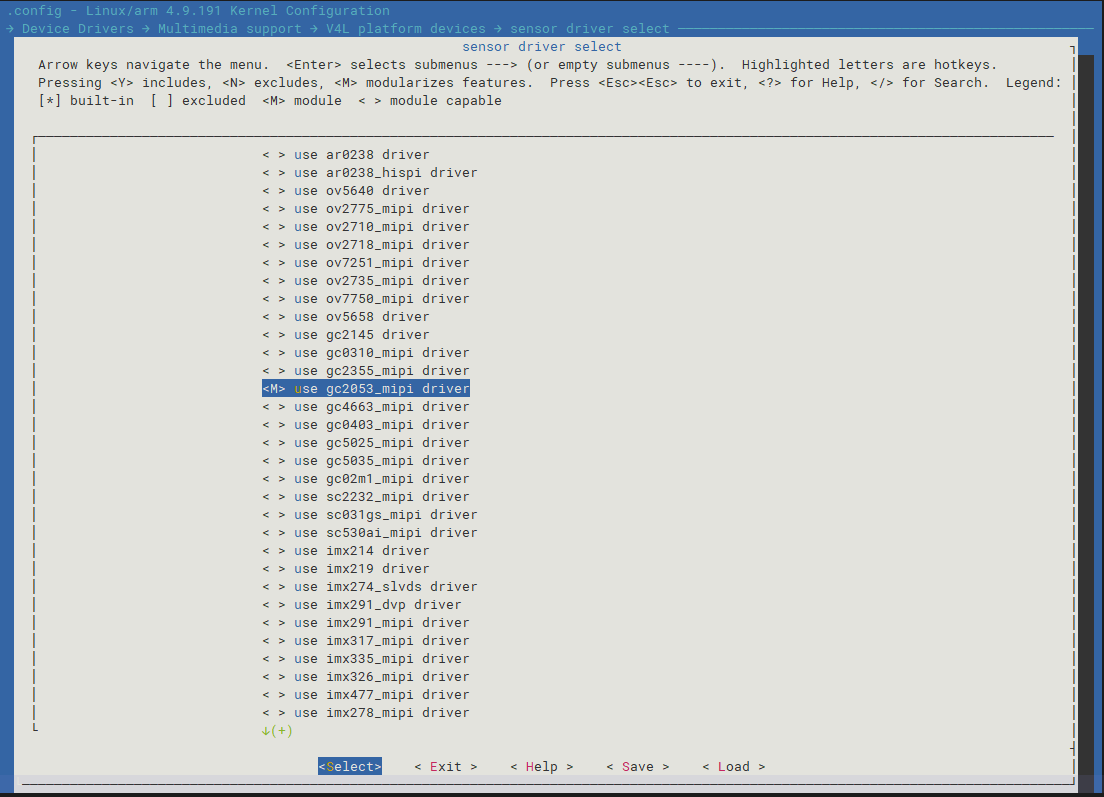
可以看到全志已经支持了很多摄像头,找到我们需要适配的摄像头,输入M将gc2053驱动编为模块。
→ Device Drivers
→ Multimedia support
→ V4L platform devices
→ sensor driver select
<M> use gc2053_mipi driver
注意:如果出现没有的路径,需要选择上一级目录才会打开。
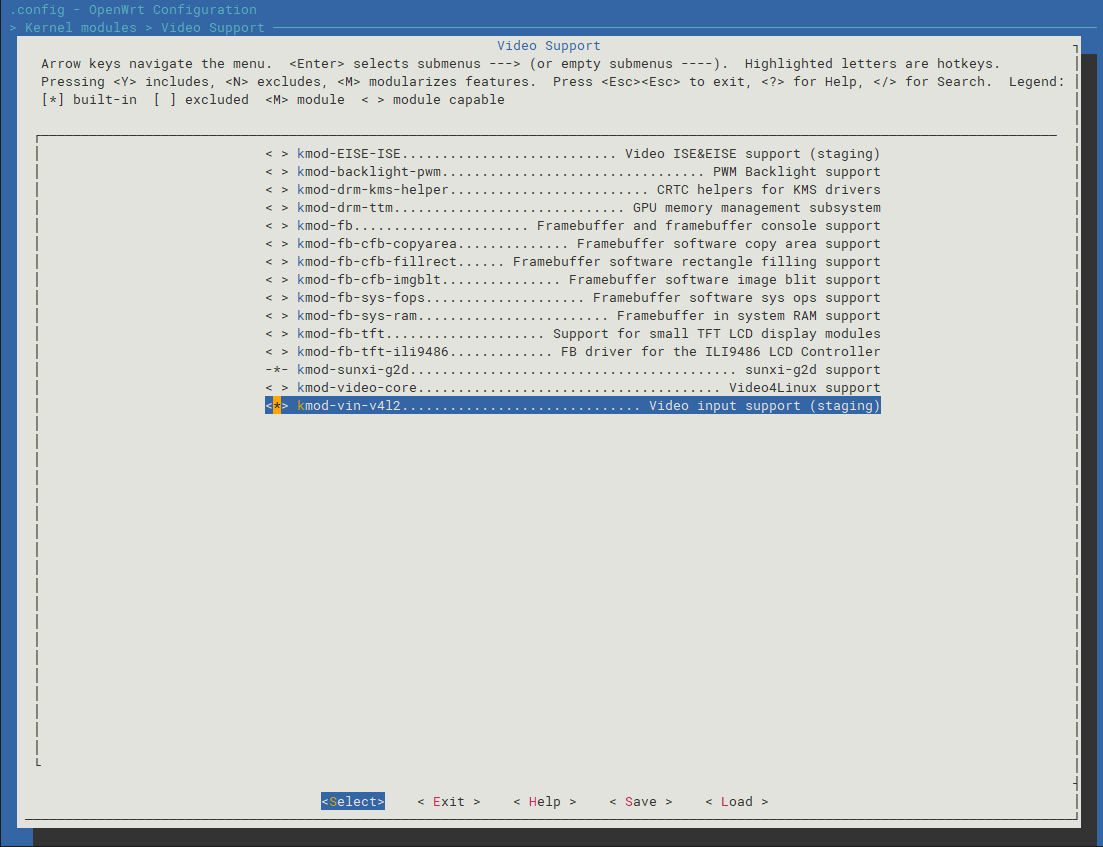
5.Tina配置
在Tina根目录下输入make menuconfig,进入如下目录
> Kernel modules
> Video Support
<*> kmod-vin-v4l2.............................. Video input support (staging)
如下图所示
6.modules.mk配置
modules.mk主要完成两个方面:
- 拷贝相关的ko模块到小机rootfs中
- rootfs启动时,按顺序自动加载相关的ko模块。
modules.mk文件路径:
tina-v853-open/openwrt/target/v853/v853-100ask/modules.mk
驱动加载顺序配置
define KernelPackage/vin-v4l2
SUBMENU:=$(VIDEO_MENU)
TITLE:=Video input support (staging)
DEPENDS:=
FILES:=$(LINUX_DIR)/drivers/media/v4l2-core/videobuf2-core.ko
FILES+=$(LINUX_DIR)/drivers/media/v4l2-core/videobuf2-dma-contig.ko
FILES+=$(LINUX_DIR)/drivers/media/v4l2-core/videobuf2-memops.ko
FILES+=$(LINUX_DIR)/drivers/media/v4l2-core/videobuf2-v4l2.ko
FILES+=$(LINUX_DIR)/drivers/media/platform/sunxi-vin/vin_io.ko
FILES+=$(LINUX_DIR)/drivers/media/platform/sunxi-vin/modules/sensor/gc2053_mipi.ko
# FILES+=$(LINUX_DIR)/drivers/media/platform/sunxi-vin/modules/sensor_power/sensor_power.ko
FILES+=$(LINUX_DIR)/drivers/media/platform/sunxi-vin/vin_v4l2.ko
FILES+=$(LINUX_DIR)/drivers/input/sensor/da380/da380.ko
AUTOLOAD:=$(call AutoProbe,videobuf2-core videobuf2-dma-contig videobuf2-memops videobuf2-v4l2 vin_io gc2053_mipi vin_v4l2 da380.ko)
endef
define KernelPackage/vin-v4l2/description
Kernel modules for video input support
endef
$(eval $(call KernelPackage,vin-v4l2))
7.S00mpp配置
V853平台在完成modules.mk配置后,还需要完成.ko挂载脚本S00mpp的配置,以便开机快速启动摄像头模块。
S00mpp配置路径:
tina-v853-open/openwrt/target/v853/v853-100ask/busybox-init-base-files/etc/init.d/S00mpp
脚本对摄像头驱动进行了提前加载,应用需要使用的时候即可快速配置并启动。
#!/bin/sh
#
# Load mpp modules....
#
MODULES_DIR="/lib/modules/`uname -r`"
start() {
printf "Load mpp modules\n"
insmod $MODULES_DIR/videobuf2-core.ko
insmod $MODULES_DIR/videobuf2-memops.ko
insmod $MODULES_DIR/videobuf2-dma-contig.ko
insmod $MODULES_DIR/videobuf2-v4l2.ko
insmod $MODULES_DIR/vin_io.ko
# insmod $MODULES_DIR/sensor_power.ko
insmod $MODULES_DIR/gc4663_mipi.ko
insmod $MODULES_DIR/vin_v4l2.ko
insmod $MODULES_DIR/sunxi_aio.ko
insmod $MODULES_DIR/sunxi_eise.ko
# insmod $MODULES_DIR/vipcore.ko
}
stop() {
printf "Unload mpp modules\n"
# rmmod $MODULES_DIR/vipcore.ko
rmmod $MODULES_DIR/sunxi_eise.ko
rmmod $MODULES_DIR/sunxi_aio.ko
rmmod $MODULES_DIR/vin_v4l2.ko
rmmod $MODULES_DIR/gc4663_mipi.ko
# rmmod $MODULES_DIR/sensor_power.ko
rmmod $MODULES_DIR/vin_io.ko
rmmod $MODULES_DIR/videobuf2-v4l2.ko
rmmod $MODULES_DIR/videobuf2-dma-contig.ko
rmmod $MODULES_DIR/videobuf2-memops.ko
rmmod $MODULES_DIR/videobuf2-core.ko
}
case "$1" in
start)
start
;;
stop)
stop
;;
restart|reload)
stop
start
;;
*)
echo "Usage: $0 {start|stop|restart}"
exit 1
esac
exit $?
8.增加摄像头测试程序
在Tina根目录下执行make menuconfig,进入Tina配置界面后,进入如下目录,输入Y选中camerademo测试程序。
> Allwinner
> Vision
<*> camerademo........................................ camerademo test sensor --->
8.编译烧写镜像
在Tina的根目录下,输入make -j32
book@100ask:~/workspaces/tina-v853-open$ make -j32
...
book@100ask:~/workspaces/tina-v853-open$ pack
...
生成镜像后,将tina-v853-open/out/v853/100ask/openwrt/目录下的v853_linux_100ask_uart0.img镜像拷贝到Windows电脑主机中,使用全志PhoenixSuit烧写工具烧写到开发板上。
上电前需要连接插上12V的电源线,和两条Type-C,把开关拨向电源接口方向上电,烧写新镜像后等待启动系统,在命令行中输入lsmod
root@TinaLinux:/# lsmod
Module Size Used by
vin_v4l2 181099 0
gc2053_mipi 8567 0
vin_io 21106 3 vin_v4l2,gc2053_mipi
videobuf2_v4l2 9304 1 vin_v4l2
videobuf2_dma_contig 8632 1 vin_v4l2
videobuf2_memops 948 1 videobuf2_dma_contig
videobuf2_core 22168 2 vin_v4l2,videobuf2_v4l2
xradio_wlan 598 0
xradio_core 431911 1 xradio_wlan
xradio_mac 222724 1 xradio_core
可以看到我们之前选中的VIN驱动和GC2053驱动已经装载进去了
9.运行camera测试程序
在开发板的串口终端界面输入camedemo -h可以输出camera测试程序的使用教程
root@TinaLinux:/# camerademo -h
[CAMERA]**********************************************************
[CAMERA]* *
[CAMERA]* this is camera test. *
[CAMERA]* *
[CAMERA]**********************************************************
[CAMERA]******************** camerademo help *********************
[CAMERA] This program is a test camera.
[CAMERA] It will query the sensor to support the resolution, output format and test frame rate.
[CAMERA] At the same time you can modify the data to save the path and get the number of photos.
[CAMERA] When the last parameter is debug, the output will be more detailed information
[CAMERA] There are eight ways to run:
[CAMERA] 1.camerademo --- use the default parameters.
[CAMERA] 2.camerademo debug --- use the default parameters and output debug information.
[CAMERA] 3.camerademo setting --- can choose the resolution and data format.
[CAMERA] 4.camerademo setting debug --- setting and output debug information.
[CAMERA] 5.camerademo NV21 640 480 30 bmp /tmp 5 --- param input mode,can save bmp or yuv.
[CAMERA] 6.camerademo NV21 640 480 30 bmp /tmp 5 debug --- output debug information.
[CAMERA] 7.camerademo NV21 640 480 30 bmp /tmp 5 Num --- /dev/videoNum param input mode,can save bmp or yuv.
[CAMERA] 8.camerademo NV21 640 480 30 bmp /tmp 5 Num debug --- /dev/videoNum output debug information.
[CAMERA] 8.camerademo NV21 640 480 30 bmp /tmp 5 Num 1 --- 1/2: chose memory: V4L2_MEMORY_MMAP/USERPTR
[CAMERA]**********************************************************
在开发板的串口终端界面输入camerademo NV21 640 480 30 bmp /tmp 5,将会拍摄5张照片放在/tmp目录下,将/tmp目录下的文件拷贝到电脑端即可查看相应的图片。
具体教程可以参考:camera功能测试 - 全志Linux Tina-SDK开发完全手册