目标检测模型yolov3部署指南
0.前言
上一节我们已经学习了如何配置NPU模型转换工具,这一章节演示增加NPU拓展包,该拓展包包含Lenet、YOLOV3测试用例,并实现yolov3模型转换部署。
NPU拓展包下载地址:https://www.aw-ol.com/downloads?cat=18
全志官方NPU介绍:https://v853.docs.aw-ol.com/npu/dev_npu/
资源包:(包含模型结构描述文件cfg、权重文件weights和测试图像)
1.安装NPU拓展包

将下载V853 NPU扩展软件包.gz重命名为npu_package.tar.gz,并将该拓展包放在Tina根目录下。
如无法下载可访问AICT开发板资料中 :02_开发工具/【Linux】NPU拓展包 中获取
如无法下载可访问AICT开发板资料中 :02_开发工具/【Linux】NPU拓展包 中获取
如无法下载可访问AICT开发板资料中 :02_开发工具/【Linux】NPU拓展包 中获取
如下所示:
book@100ask:~/workspaces/tina-v853-open$ ls
brandy build buildroot build.sh device kernel npu_package.tar.gz openwrt out platform prebuilt tools
在终端中解压npu拓展压缩包
book@100ask:~/workspaces/tina-v853-open$ tar xvf npu_package.tar.gz openwrt/package/npu/
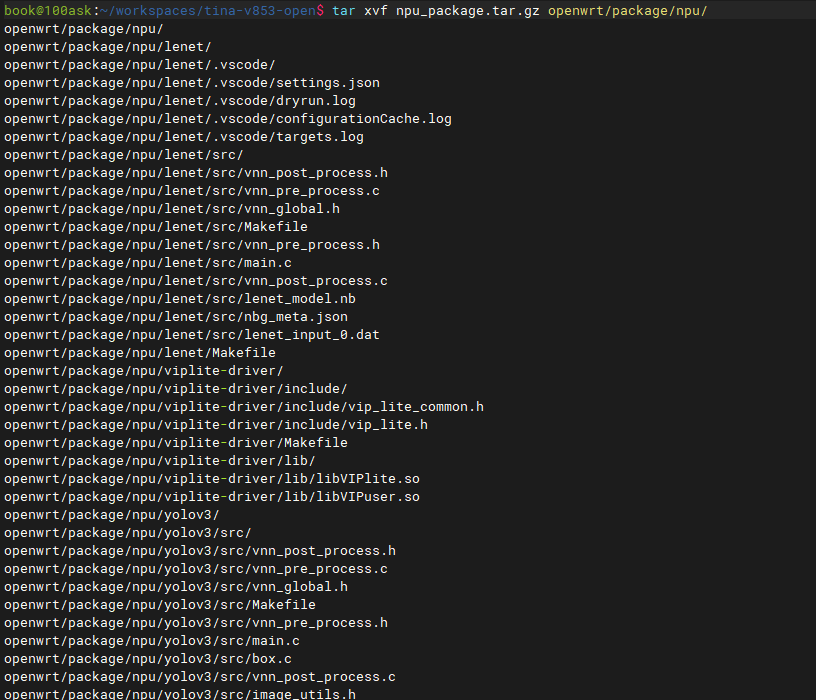
解压完成后,拓展包就自动安装到Tina的配置中。
2.配置yolov3
重新使能Tina环境配置,并加载选中100ASK_V853-PRO开发板方案。
book@100ask:~/workspaces/tina-v853-open$ source build/envsetup.sh
...
book@100ask:~/workspaces/tina-v853-open$ lunch
You're building on Linux
Lunch menu... pick a combo:
1 v853-100ask-tina
2 v853-vision-tina
Which would you like? [Default v853-100ask]: 1
...
进入Tina配置界面,输入
make menuconfig
进入如下目录:
> Allwinner
> NPU
< > lenet......................................................... lenet demo (NEW)
<*> viplite-driver................................... viplite driver for NPU (NEW)
< > vpm_run................................................ vpm model runner (NEW)
<*> yolov3....................................................... yolov3 demo (NEW)
<*> yolov3-model.............................. yolov3 test demo model (37 MB)
选中viplite-driver和yolov3,如下图所示:
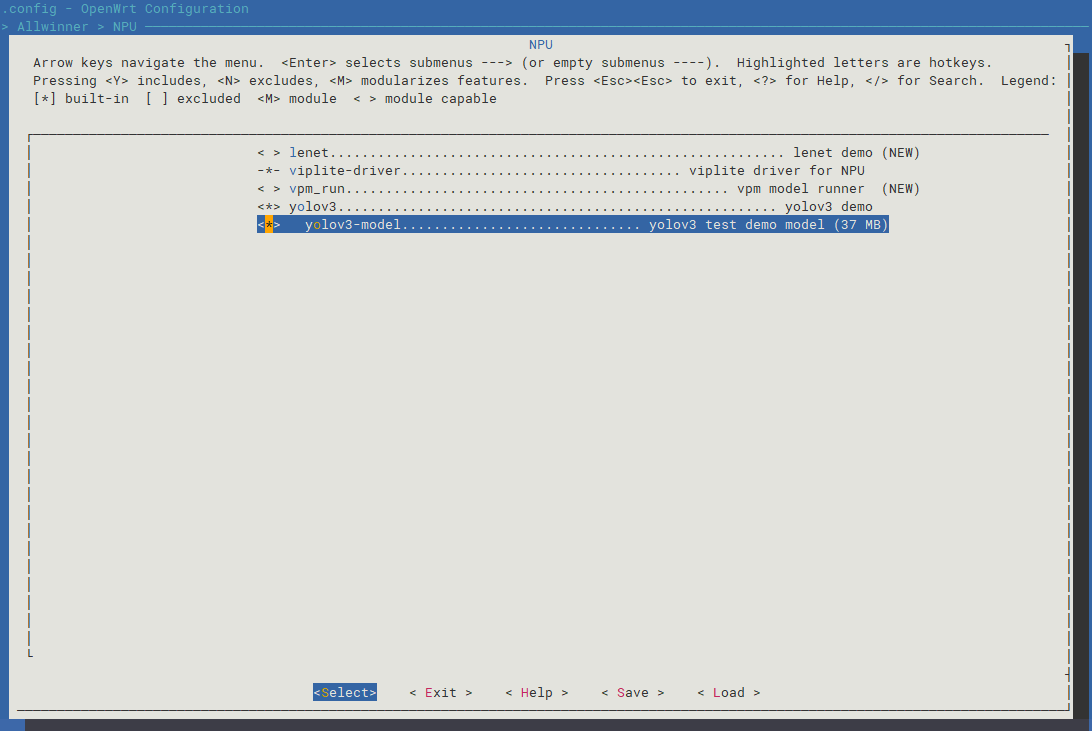
选中完成后,保存并退出Tina配置界面。
yolov3 Demo示例的源码位于:tina-v853-open/openwrt/package/npu/yolov3
book@100ask:~/workspaces/tina-v853-open/openwrt/package/npu/yolov3$ ls
Makefile src
book@100ask:~/workspaces/tina-v853-open/openwrt/package/npu/yolov3$ tree
.
├── Makefile
└── src
├── bmp.h
├── box.c
├── box.h
├── image_utils.c
├── image_utils.h
├── main.c
├── Makefile
├── vnn_global.h
├── vnn_post_process.c
├── vnn_post_process.h
├── vnn_pre_process.c
├── vnn_pre_process.h
├── yolo_layer.c
├── yolo_layer.h
├── yolov3_model.nb
└── yolo_v3_post_process.c
1 directory, 17 files
3.测试yolov3 Demo
测试前需要准备一张416*416格式的图像

将图像使用ADB传入开发板中
book@100ask:~/workspaces/testImg$ adb push test01.jpg /tmp/
test01.jpg: 1 file pushed. 0.5 MB/s (22616 bytes in 0.048s)
进入串口终端后,进入tmp目录下
root@TinaLinux:~# cd /tmp/
root@TinaLinux:/tmp# ls
UNIX_WIFI.domain lock test01.jpg wpa_ctrl_1067-2
lib run wpa_ctrl_1067-1
使用yolov3 Demo测试图像,输入
root@TinaLinux:/tmp# yolov3 /etc/models/yolov3_model.nb test01.jpg
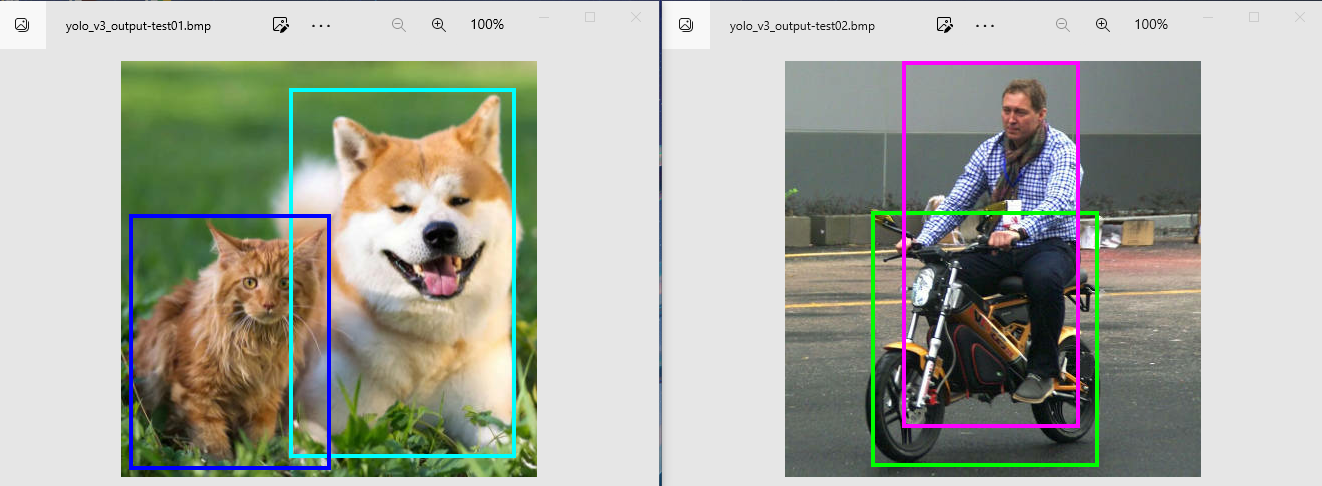
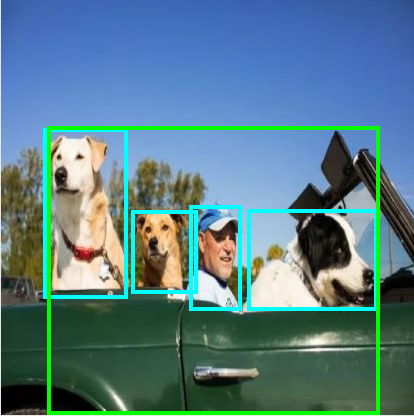
输入完成后,测试程序会将test01.jpg图像作为输入,输出test01.jpg图像的打框图像。将文件使用TF卡等方式传入Windows中查看,如下图所示:
4.转换yolov3模型
4.1 模型准备
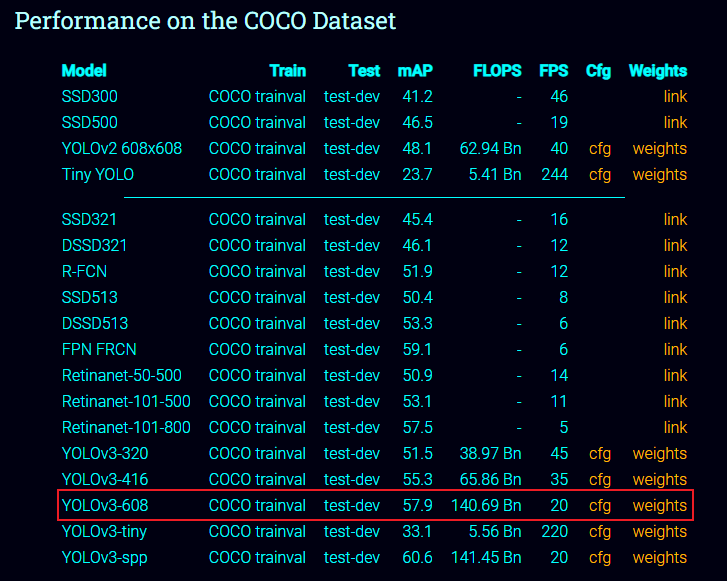
本次使用的网上下载的模型,后续将会使用字自训练生成的模型。我们使用的框架是 darknet,模型为 YOLOv3-608。 其训练的数据集是 COCO trainval 数据集,模型可以在这里下载到:YOLO: Real-Time Object Detection
分别下载模型结构描述文件cfg和权重文件weights。如果下载不了,可以在source压缩包中的yolov3目录下找到对应文件。
将下载的两个文件传入配置好模型转换工具的Ubuntu20.04中,假设传入/home/ubuntu/workspaces目录下
ubuntu@ubuntu2004:~/workspaces$ ls
yolov3.cfg yolov3.weights
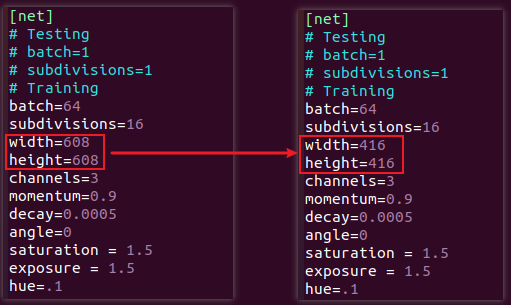
修改yolov3.cfg文件,将 width 与 height 改为 416 以获得更好的性能。
ubuntu@ubuntu2004:~/workspaces$ vi yolov3.cfg
将原本的模型宽度和高度608修改为416。
新建data文件夹,用于存放量化所需的图片。
ubuntu@ubuntu2004:~/workspaces$ mkdir data
新建dataset.txt文件,写入图片的路径和 id。
ubuntu@ubuntu2004:~/workspaces$ touch dataset.txt
假设我将两张量化图片放在/home/ubuntu/workspaces/data目录下,如下所示:
那么此时需要修改/home/ubuntu/workspaces目录下的dataset.txt文件,
ubuntu@ubuntu2004:~/workspaces$ vi dataset.txt
修改该文件的内容为:
./data/test01.jpg
./data/test02.jpg
下面为所有文件目录结构,可自行对比是否缺少对应文件。
ubuntu@ubuntu2004:~/workspaces$ tree
.
├── data
│ ├── test01.jpg
│ └── test02.jpg
├── dataset.txt
├── yolov3.cfg
└── yolov3.weights
1 directory, 5 files
4.2导入模型
在终端输入
buntu@ubuntu2004:~/workspaces$ pegasus import darknet --model yolov3.cfg --weights yolov3.weights --output-model yolov3.json --output-data yolov3.data
导入生成两个文件,分别是是 yolov3.data 和 yolov3.json 文件,他们是 YOLO V3 网络对应的芯原内部格式表示文件,分别对应原始模型文件的 yolov3.weights 和 yolov3.cfg
ubuntu@ubuntu2004:~/workspaces$ ls
data dataset.txt yolov3.cfg yolov3.data yolov3.json yolov3.weights
4.3 创建 YML 文件
YML 文件对网络的输入和输出的超参数进行描述以及配置,这些参数包括,输入输出 tensor 的形状,归一化系数 (均值,零点),图像格式,tensor 的输出格式,后处理方式等等
pegasus generate inputmeta --model yolov3.json --input-meta-output yolov3_inputmeta.yml
pegasus generate postprocess-file --model yolov3.json --postprocess-file-output yolov3_postprocessmeta.yml
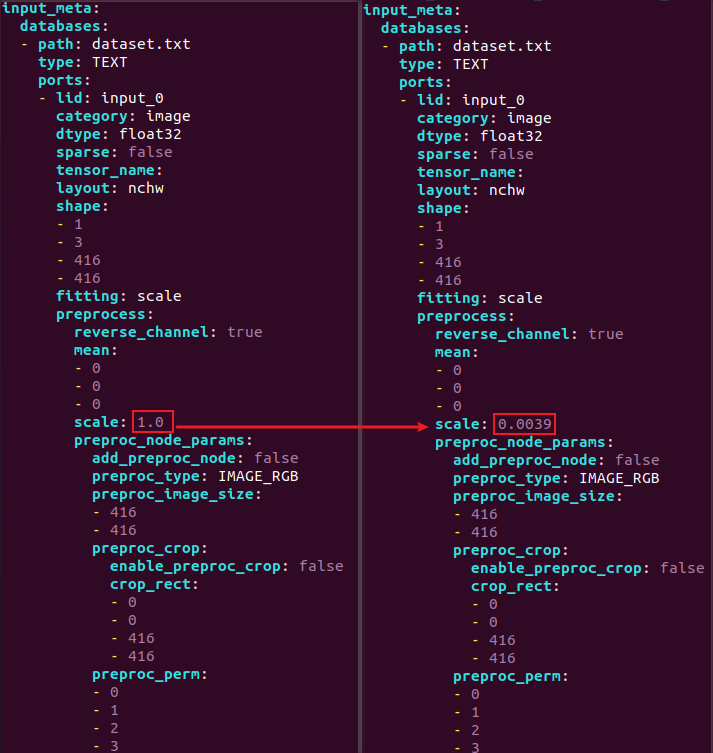
执行后生成yolov3_inputmeta.yml和yolov3_inputmeta.yml,修改yolov3_inputmeta.yml 文件中的的 scale 参数为 0.0039(1/255),目的是对输入 tensor 进行归一化,和网络进行训练的时候是对应的。
在终端输入
ubuntu@ubuntu2004:~/workspaces$ vi yolov3_inputmeta.yml
将scale的参数从原来的1.0修改为0.0039,如下图所示:
4.4量化
生成下量化表文件,使用非对称量化,uint8,修改 --batch-size 参数为你的 dataset.txt 里提供的图片数量。
pegasus quantize --model yolov3.json --model-data yolov3.data --batch-size 1 --device CPU --with-input-meta yolov3_inputmeta.yml --rebuild --model-quantize yolov3.quantize --quantizer asymmetric_affine --qtype uint8
4.5 预推理
利用前文的量化表执行预推理,得到推理 tensor,yolov3 是 1 输入 3 输出网络,所以一共产生了 4 个 tensor
pegasus inference --model yolov3.json --model-data yolov3.data --batch-size 1 --dtype quantized --model-quantize yolov3.quantize --device CPU --with-input-meta yolov3_inputmeta.yml --postprocess-file yolov3_postprocessmeta.yml
4.6 导出模板代码与模型
pegasus export ovxlib --model yolov3.json --model-data yolov3.data --dtype quantized --model-quantize yolov3.quantize --batch-size 1 --save-fused-graph --target-ide-project 'linux64' --with-input-meta yolov3_inputmeta.yml --output-path ovxilb/yolov3/yolov3prj --pack-nbg-unify --postprocess-file yolov3_postprocessmeta.yml --optimize "VIP9000PICO_PID0XEE" --viv-sdk ${VIV_SDK}
至此,模型转换完成,生成的模型存放在 ovxilb/yolov3_nbg_unify 文件夹内。
ubuntu@ubuntu2004:~/workspaces$ ls ovxilb/yolov3_nbg_unify/
BUILD makefile.linux network_binary.nb vnn_post_process.c vnn_pre_process.c vnn_yolov3prj.c yolov3prj.2012.vcxproj
main.c nbg_meta.json vnn_global.h vnn_post_process.h vnn_pre_process.h vnn_yolov3prj.h yolov3prj.vcxproj
5.使用转换后的模型测试
将模型通过adb或者TF卡的方式传入开发板中,例如通过ADB的方式:
ubuntu@ubuntu2004:~/workspaces/ovxilb/yolov3_nbg_unify$ adb push network_binary.nb /tmp/
network_binary.nb: 1 file pushed. 0.8 MB/s (39056704 bytes in 43.893s)
传入测试图片,可使用adb或者TF卡的方式传入开发板中,例如通过ADB的方式:
ubuntu@ubuntu2004:~/workspaces/data$ adb push test01.jpg /tmp/
test01.jpg: 1 file pushed. 0.6 MB/s (27095 bytes in 0.041s)
ubuntu@ubuntu2004:~/workspaces/data$ adb push test02.jpg
adb: usage: push requires an argument
ubuntu@ubuntu2004:~/workspaces/data$ adb push test02.jpg /tmp/
test02.jpg: 1 file pushed. 0.7 MB/s (30697 bytes in 0.041s)
传入完成后,进入开发板的串口终端,进入/tmp/目录下,即可看到传入的文件
root@TinaLinux:~# cd /tmp/
root@TinaLinux:/tmp# ls
lock test01.jpg wpa_ctrl_1067-2
UNIX_WIFI.domain network_binary.nb test02.jpg
lib run wpa_ctrl_1067-1
测试test01.jpg,输入
root@TinaLinux:/tmp# yolov3 ./network_binary.nb test01.jpg
[0xb6f0c560]vip_init[104], [ 1374.785733] npu[4ca][4ca] vipcore, device init..
The version of Viplite is: 1.8[ 1374.793243] set_vip_power_clk ON
.0-0-AW-2022-04-21
[ 1374.801777] enter aw vip mem alloc size 83886080
[ 1374.811007] aw_vip_mem_alloc vir 0xe2c00000, phy 0x48800000
[ 1374.817350] npu[4ca][4ca] gckvip_drv_init kernel logical phy address=0x48800000 virtual =0xe2c00000
Create Neural Network: 73.30ms or 73297.75us
Start run graph [1] times...
Run the 1 time: 201.00ms or 200999.30us
vip run network execution time:
Total 201.15ms or 201152.98us
Average 201.15ms or 201152.98us
data_format=2 buff_size=43095
data_format=2 buff_size=172380
data_format=2 buff_size=689520
dog 97% 168 394 27 396
cat 95% 8 209 153 408
[ 1375.455490] npu[4ca][4ca] gckvip_drv_exit, aw_vip_mem_free
[ 1375.461792] aw_vip_mem_free vir 0xe2c00000, phy 0x48800000
[ 1375.467981] aw_vip_mem_free dma_unmap_sg_atrs
[ 1375.473057] aw_vip_mem_free ion_unmap_kernel
[ 1375.479885] aw_vip_mem_free ion_free
[ 1375.484023] aw_vip_mem_free ion_client_destroy
[ 1375.494199] npu[4ca][4ca] vipcore, device un-init..
测试完将输出的打框图像传入TF卡中
root@TinaLinux:/tmp# mount /dev/mmcblk1p1 /mnt/extsd/
root@TinaLinux:/tmp# cp yolo_v3_output.bmp /mnt/extsd/yolo_v3_output-test01.bmp
测试test02.jpg,输入
root@TinaLinux:/tmp# yolov3 ./network_binary.nb test02.jpg
[0xb6f9d560]vip_init[104], [ 1541.123871] npu[4d3][4d3] vipcore, device init..
The version of Viplite is: 1.8[ 1541.131453] set_vip_power_clk ON
.0-0-AW-2022-04-21
[ 1541.139871] enter aw vip mem alloc size 83886080
[ 1541.148078] aw_vip_mem_alloc vir 0xe2c00000, phy 0x48800000
[ 1541.154367] npu[4d3][4d3] gckvip_drv_init kernel logical phy address=0x48800000 virtual =0xe2c00000
Create Neural Network: 73.51ms or 73514.38us
Start run graph [1] times...
Run the 1 time: 201.01ms or 201008.95us
vip run network execution time:
Total 201.16ms or 201164.50us
Average 201.16ms or 201164.50us
data_format=2 buff_size=43095
data_format=2 buff_size=172380
data_format=2 buff_size=689520
motorbike 99% 86 313 150 405
person 100% 117 294 0 366
[ 1541.793857] npu[4d3][4d3] gckvip_drv_exit, aw_vip_mem_free
[ 1541.800091] aw_vip_mem_free vir 0xe2c00000, phy 0x48800000
[ 1541.806330] aw_vip_mem_free dma_unmap_sg_atrs
[ 1541.811397] aw_vip_mem_free ion_unmap_kernel
[ 1541.818379] aw_vip_mem_free ion_free
[ 1541.822433] aw_vip_mem_free ion_client_destroy
[ 1541.836550] npu[4d3][4d3] vipcore, device un-init..
测试完将输出的打框图像传入TF卡中
root@TinaLinux:/tmp# cp yolo_v3_output.bmp /mnt/extsd/yolo_v3_output-test02.bmp
使用电脑端查看TF中的两张输出图像如下所示: