100ASK_V853-PRO开发板支持E907小核开发
0.前言
100ASK_V853-PRO开发板的V853芯片集成Arm Cortex-A7和RISC-V E907 双CPU,玄铁E907 是一款完全可综合的高端 MCU 处理器。它兼容 RV32IMAC 指令集,提供可观的整型性能提升以及高能效的浮点性能。E907 的主要特性包括:单双精度浮点单元,以及快速中断响应。下图为RISC-V E907 核的介绍。

本章主要讲述如何E907小核进行开发并与Arm A7大核进行通信。
平头哥E907官网:Product - T-Head-Embrace Digital Intelligence Future with Chip Power
E907芯片资源下载中心:https://occ.t-head.cn/community/download?id=3916180248689188864
全志E907开发指南:概述与介绍 - 全志Linux Tina-SDK开发完全手册
Yuzuki大佬的V85x E907 小核开发与使用:V85x E907 小核开发与使用 | 柚木鉉の空間 GloomyGhost Blog
1.配置E907环境
E907_RTOS BSP包:Yuzukilizard/Software/BSP/e907_rtos at master · YuzukiHD/Yuzukilizard · GitHub
感谢Yuzuki大佬的V851S的仓库提供的E907_RTOS源码,这里我将E907开发包放在百度网盘中,方便大家获取。链接为:
链接:百度网盘 请输入提取码 提取码:sp6a
您可以在百度网盘的V853资料光盘中09_E907开发包中获取到e907_rtos.tar.gz
1.1 编译E907源码
将下载完成的E907开发包放在任意目录下,假设放在/home/book/workspaces目录下
book@100ask:~/workspaces$ ls
e907_rtos.tar.gz
解压e907源码压缩包,输入tar -xzvf e907_rtos.tar.gz,例如:
book@100ask:~/workspaces$ tar -xzvf e907_rtos.tar.gz
e907_rtos/
e907_rtos/README.md
e907_rtos/rtos/
e907_rtos/rtos/LICENSE
e907_rtos/rtos/toolchain/
e907_rtos/rtos/toolchain/riscv64-elf-x86_64-20201104/
e907_rtos/rtos/toolchain/riscv64-elf-x86_64-20201104/libexec/
e907_rtos/rtos/toolchain/riscv64-elf-x86_64-20201104/libexec/gcc/
解压完成后,进入e907源码目录
book@100ask:~/workspaces$ cd e907_rtos/
book@100ask:~/workspaces/e907_rtos$ ls
README.md rtos rtos-hal
进入rtos/source/目录下
book@100ask:~/workspaces/e907_rtos$ cd rtos/source/
book@100ask:~/workspaces/e907_rtos/rtos/source$ ls
disfunc.sh ekernel envsetup.sh Kbuild Kconfig.melis Makefile modules.order platform.txt scripts
drivers emodules include Kconfig Kconfig.platform melis-env.sh out projects tools
配置编译环境变量,输入source melis-env.sh
book@100ask:~/workspaces/e907_rtos/rtos/source$ source melis-env.sh
输入lunch选中对应的开发板
book@100ask:~/workspaces/e907_rtos/rtos/source$ lunch
You're building on Linux 100ask 5.4.0-148-generic #165~18.04.1-Ubuntu SMP Thu Apr 20 01:14:06 UTC 2023 x86_64 x86_64 x86_64 GNU/Linux
Lunch menu... pick a combo:
The supported board:
1. v851-e907-lizard
2. v851-e907-lizard-tinymaix
3. v853-e907-100ask
4. v853-e907-100ask-tinymaix
What is your choice?
此时输入3,并按回车。选择v853-e907-100ask方案,选择完成后会如下所示
book@100ask:~/workspaces/e907_rtos/rtos/source$ lunch
You're building on Linux 100ask 5.4.0-148-generic #165~18.04.1-Ubuntu SMP Thu Apr 20 01:14:06 UTC 2023 x86_64 x86_64 x86_64 GNU/Linux
Lunch menu... pick a combo:
The supported board:
1. v851-e907-lizard
2. v851-e907-lizard-tinymaix
3. v853-e907-100ask
4. v853-e907-100ask-tinymaix
What is your choice? 3
You have select v853-e907-100ask
============================================
Project Based On Platform sun20iw3p1 v853-e907-100ask
============================================
此时即可进行编译,输入make
book@100ask:~/workspaces/e907_rtos/rtos/source$ make
scripts/kconfig/conf --silentoldconfig Kconfig
CHK include/config/kernel.release
CHK include/generated/uapi/melis/version.h
fatal: not a git repository (or any parent up to mount point /)
Stopping at filesystem boundary (GIT_DISCOVERY_ACROSS_FILESYSTEM not set).
fatal: not a git repository (or any parent up to mount point /)
Stopping at filesystem boundary (GIT_DISCOVERY_ACROSS_FILESYSTEM not set).
fatal: not a git repository (or any parent up to mount point /)
Stopping at filesystem boundary (GIT_DISCOVERY_ACROSS_FILESYSTEM not set).
fatal: not a git repository (or any parent up to mount point /)
Stopping at filesystem boundary (GIT_DISCOVERY_ACROSS_FILESYSTEM not set).
UPD include/generated/uapi/melis/version.h
CHK include/generated/utsrelease.h
CC sysconfig.fex
CC ekernel/arch/common/common.o
LD ekernel/arch/common/built-in.o
AS ekernel/arch/riscv/sunxi/blobdata.o
LD ekernel/arch/riscv/sunxi/built-in.o
LD ekernel/arch/riscv/built-in.o
LD ekernel/arch/built-in.o
LD ekernel/built-in.o
LD [M] ekernel/melis30.o
/home/book/workspaces/e907_rtos/rtos/source/../toolchain/riscv64-elf-x86_64-20201104//bin/riscv64-unknown-elf-ld: ekernel/melis30.o: section .dram_seg.stack lma 0x43c3a2b8 adjusted to 0x43c3a34c
OBJCOPY ekernel/melis30.bin
RENAME ekernel/melis30.o ----> ekernel/melis30.elf
/home/book/workspaces/e907_rtos/rtos/source/../toolchain/riscv64-elf-x86_64-20201104//bin/riscv64-unknown-elf-strip: ekernel/stW7SdkR: section .dram_seg.stack lma 0x43c3a2b8 adjusted to 0x43c3a34c
text data bss dec hex filename
221280 17132 25488 263900 406dc ekernel/melis30.elf
pack melis
#### make completed successfully (11 seconds) ####
编译完成后会在当前目录的ekernel/下生成一个melis30.elf文件,该文件即可用于启动小核。
1.2 E907配置项
E907开发包的配置与Tina SDK的配置类似,在e907_rtos/rtos/source目录下,执行make menuconfig
例如:
book@100ask:~/workspaces/e907_rtos/rtos/source$ make menuconfig
执行完成后会进入如下界面:
2.加载E907小核
2.1 Tina配置
2.1.1 设备树配置
在Tina根目录下,进入设备树目录
book@100ask:~/workspaces/tina-v853-open$ cd device/config/chips/v853/configs/100ask/
编辑设备树
book@100ask:~/workspaces/tina-v853-open/device/config/chips/v853/configs/100ask$ vi board.dts
在设备树文件中找到E907相关的设备树节点,设备树默认设置为:
reserved-memory {
e907_dram: riscv_memserve {
reg = <0x0 0x48000000 0x0 0x00400000>;
no-map;
};
vdev0buffer: vdev0buffer@47000000 {
/* 256k reserved for shared mem pool */
compatible = "shared-dma-pool";
reg = <0x0 0x47000000 0x0 0x40000>;
no-map;
};
vdev0vring0: vdev0vring0@47040000 {
reg = <0x0 0x47040000 0x0 0x20000>;
no-map;
};
vdev0vring1: vdev0vring1@47060000 {
reg = <0x0 0x47060000 0x0 0x20000>;
no-map;
};
};
e907_rproc: e907_rproc@0 {
compatible = "allwinner,sun8iw21p1-e907-rproc";
clock-frequency = <600000000>;
memory-region = <&e907_dram>, <&vdev0buffer>,
<&vdev0vring0>, <&vdev0vring1>;
mboxes = <&msgbox 0>;
mbox-names = "mbox-chan";
iommus = <&mmu_aw 5 1>;
memory-mappings =
/* DA len PA */
/* DDR for e907 */
< 0x48000000 0x00400000 0x48000000 >;
core-name = "sun8iw21p1-e907";
firmware-name = "melis-elf";
status = "okay";
};
rpbuf_controller0: rpbuf_controller@0 {
compatible = "allwinner,rpbuf-controller";
remoteproc = <&e907_rproc>;
ctrl_id = <0>; /* index of /dev/rpbuf_ctrl */
iommus = <&mmu_aw 5 1>;
status = "okay";
};
rpbuf_sample: rpbuf_sample@0 {
compatible = "allwinner,rpbuf-sample";
rpbuf = <&rpbuf_controller0>;
status = "okay";
};
由于我们需要使用uart3打印E907小核的打印信息,为防止内核抢占uart3,所以需要禁用uart3节点
&uart3 {
pinctrl-names = "default", "sleep";
pinctrl-0 = <&uart3_pins_active>;
pinctrl-1 = <&uart3_pins_sleep>;
uart-supply = <®_dcdc1>;
status = "okay";
};
修改设备树复用
uart3_pins_active: uart3@0 {
allwinner,pins = "PH0", "PH1";
allwinner,function = "uart3";
allwinner,muxsel = <5>;
allwinner,drive = <1>;
allwinner,pull = <1>;
};
uart3_pins_sleep: uart3@1 {
allwinner,pins = "PH0", "PH1";
allwinner,function = "gpio_in";
allwinner,muxsel = <0>;
};
2.1.2 内核配置
在Tina根目录下,执行make kernel_menuconfig,例如:
book@100ask:~/workspaces/tina-v853-open$ make kernel_menuconfig
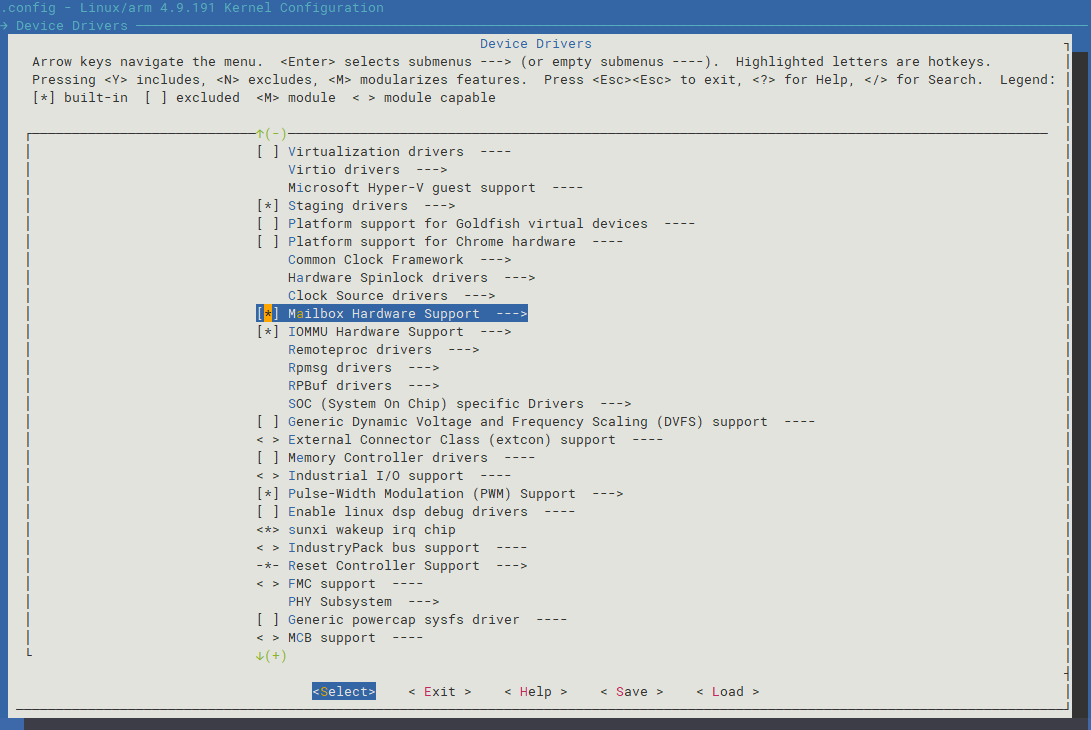
1.使能硬件支持
进入内核配置界面后,进入Device Drivers目录,选中Mailbox Hardware Support,如下图所示
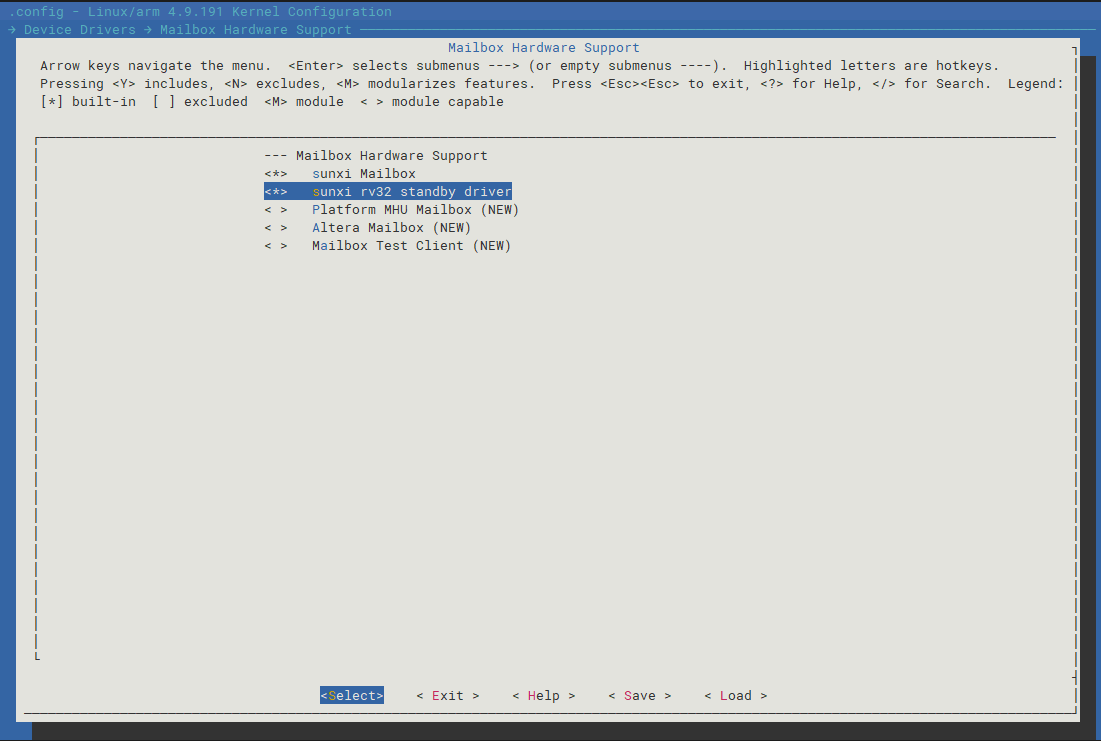
选中后进入Mailbox Hardware Support目录中,选中sunxi Mailbox和sunxi rv32 standby driver,选中完成后如下图所示:
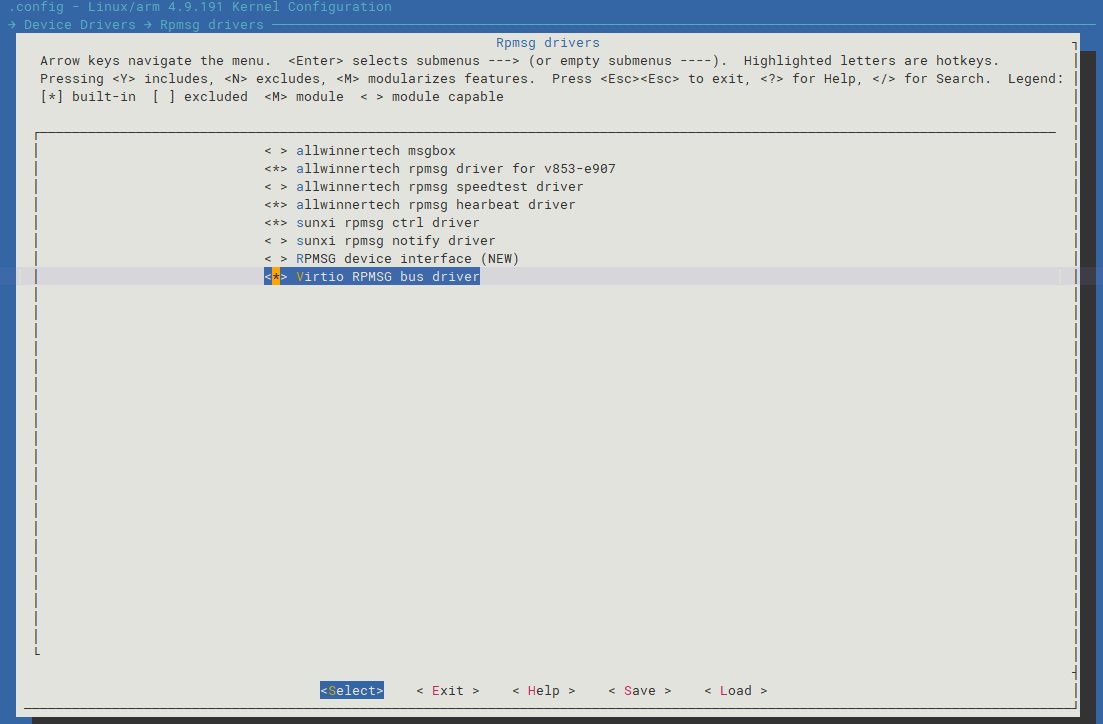
2.使能RPMsg驱动
进入如下目录中
→ Device Drivers
→ Rpmsg drivers
选中如下配置
<*> allwinnertech rpmsg driver for v853-e907
<*> allwinnertech rpmsg hearbeat driver
<*> sunxi rpmsg ctrl driver
<*> Virtio RPMSG bus driver
选中完成后如下图所示:
3.使能共享内存驱动
进入如下目录中
→ Device Drivers
→ Remoteproc drivers
选中如下配置
<*> SUNXI remote processor support --->
如下图所示:
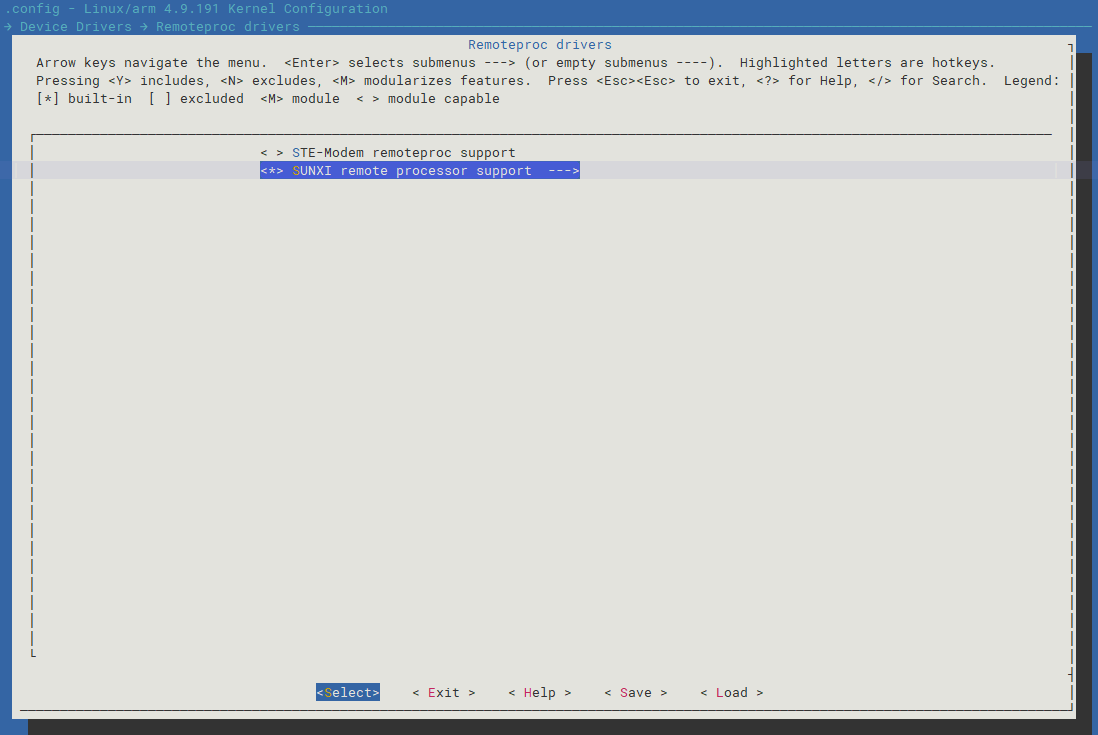
修改完成后,保存内核配置并退出。
2.1.3 编译新镜像
在Tina根目录下,输入make编译刚刚选中的内核驱动,编译完成后,输入pack,打包生成新镜像。例如:
book@100ask:~/workspaces/tina-v853-open$ make
...
book@100ask:~/workspaces/tina-v853-open$ pack
生成新镜像后,将生成的v853_linux_100ask_uart0.img文件拷贝到Windows主机端。
2.2 E907配置
2.2.1 修改E907链接脚本
进入目录e907_rtos/rtos/source/projects/v853-e907-100ask中,找到kernel.lds文件,该文件保存有E907小核的链接信息。
book@100ask:~/workspaces/e907_rtos/rtos/source/projects/v853-e907-100ask$ ls
configs data epos.img kernel.lds src version
修改kernel.lds,找到MEMORY节点,修改起始地址为0x48000000,长度为0x00400000。此参数需要和Tina设备树中的E907内存参数一致,所以可修改MEMORY节点参数为:
MEMORY
{
/*DRAM_KERNEL: 4M */
DRAM_SEG_KRN (rwx) : ORIGIN = 0x48000000, LENGTH = 0x00400000
}
两者对比图如下:

这里使用的0x48000000是假设V853拥有128M的内存,可设置十六进制为为0x48000000;长度为4M,十六进制为0x00400000
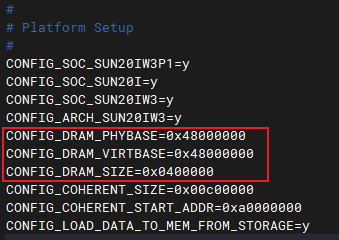
2.2.2 修改E907配置
进入e907_rtos/rtos/source/projects/v853-e907-100ask/configs目录下,修改defconfig文件,例如:
book@100ask:~/workspaces/e907_rtos/rtos/source/projects/v853-e907-100ask$ cd configs/
book@100ask:~/workspaces/e907_rtos/rtos/source/projects/v853-e907-100ask/configs$ ls
defconfig sys_config.fex
修改下面三个参数为:
CONFIG_DRAM_PHYBASE=0x48000000
CONFIG_DRAM_VIRTBASE=0x48000000
CONFIG_DRAM_SIZE=0x0400000
如下图所示:
2.2.3 使用uart3输出信息
1.修改引脚复用
配置引脚复用文件,进入e907_rtos/rtos/source/projects/v853-e907-100ask/configs目录下
修改sys_config.fex文件,通过查询数据手册,查看引脚复用功能,我们使用PH0和PH1作为uart3功能
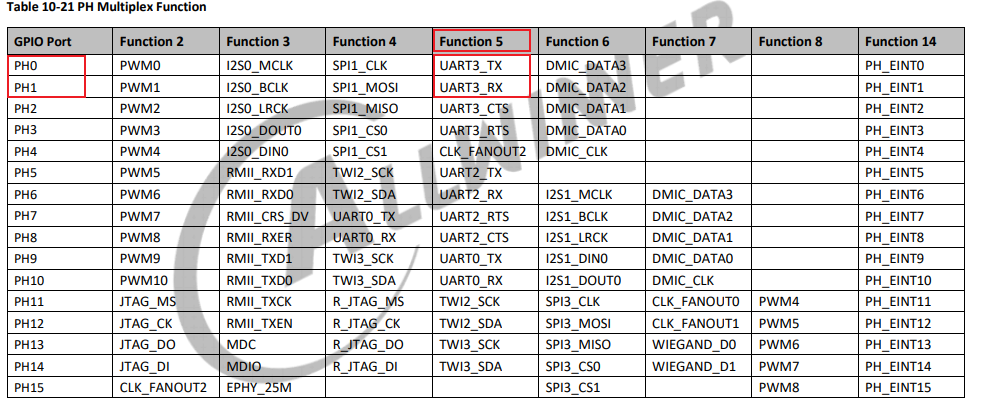
修改uart3节点为:
[uart3]
uart_tx = port:PH00<5><1><default><default>
uart_rx = port:PH01<5><1><default><default>
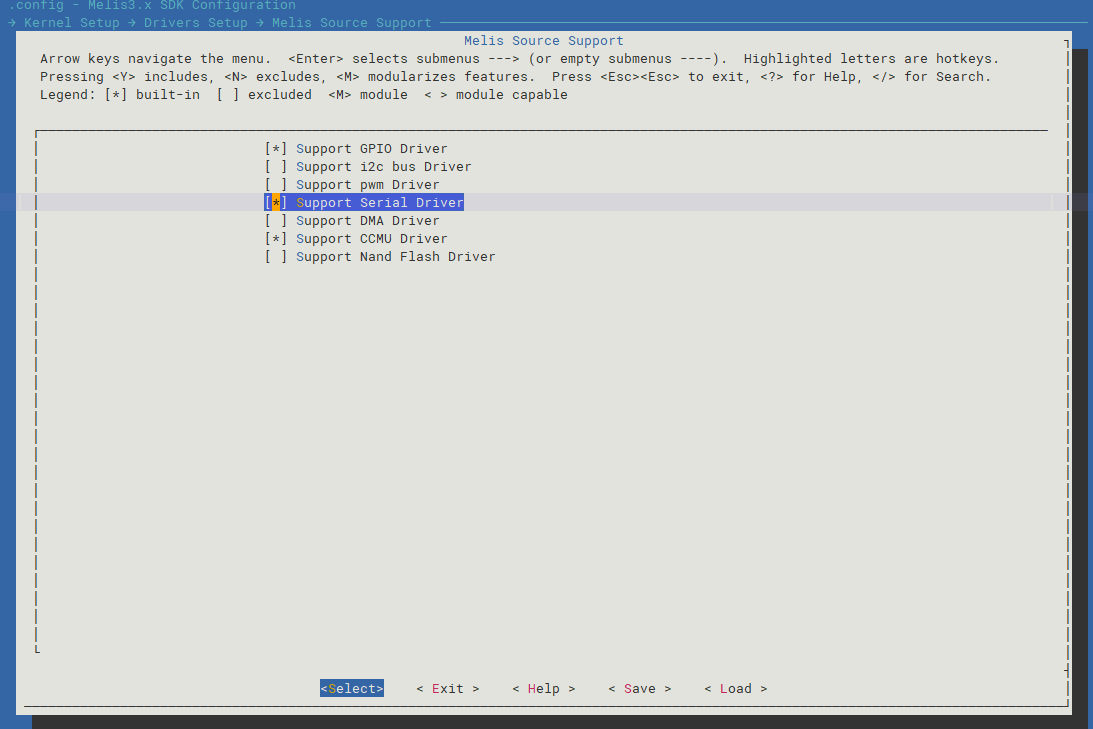
2.修改配置
在e907_rtos/rtos/source目录下输入make menuconfig,进入E907配置界面
进入如下目录,选中[*] Support Serial Driver
→ Kernel Setup
→ Drivers Setup
→ Melis Source Support
[*] Support Serial Driver
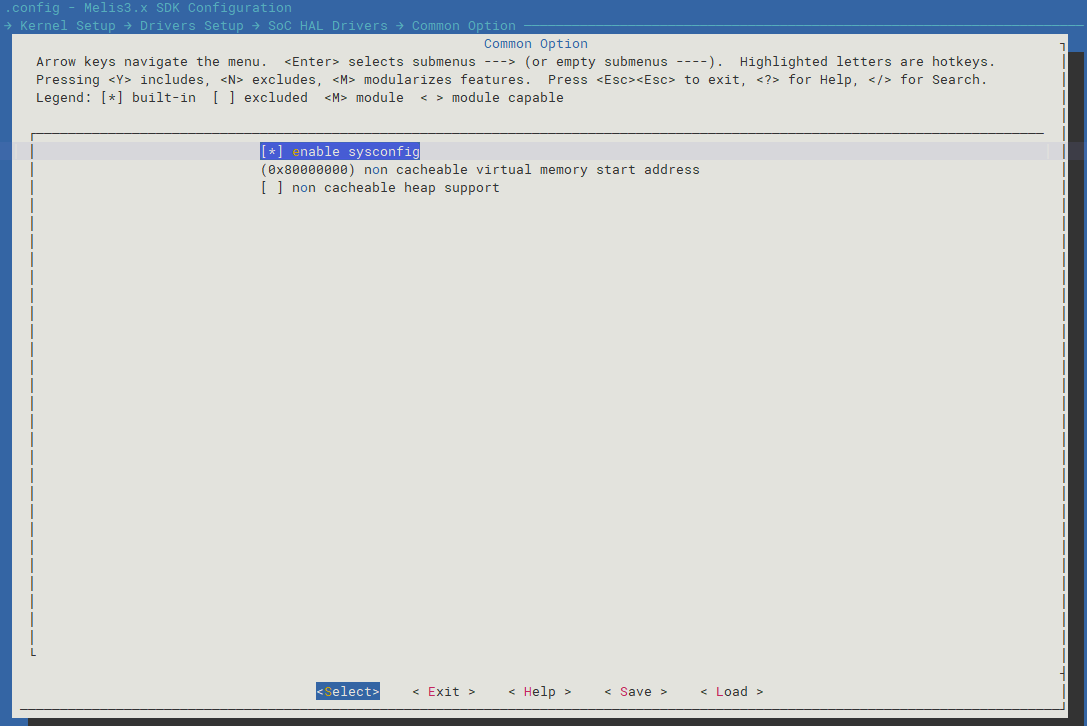
进入如下目录,选中[*] enable sysconfig,启用读取解析 sys_config.fex 功能
→ Kernel Setup
→ Drivers Setup
→ SoC HAL Drivers
→ Common Option
[*] enable sysconfig
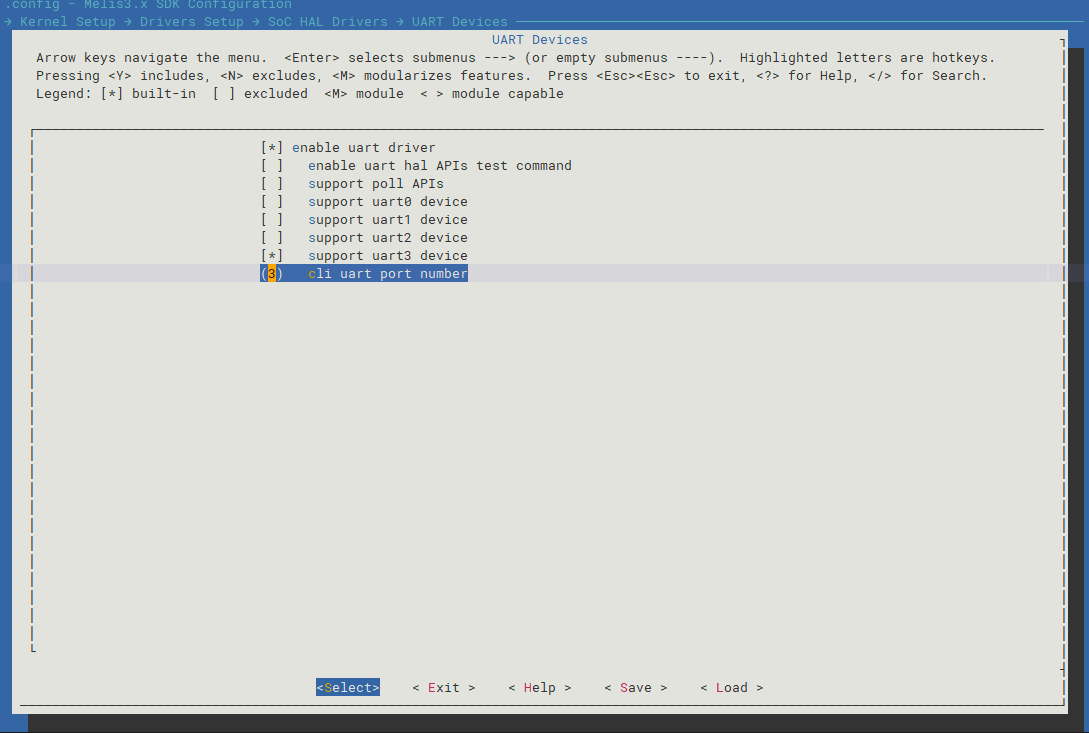
进入如下目录中,启用uart驱动,并使用uart3。
→ Kernel Setup
→ Drivers Setup
→ SoC HAL Drivers
→ UART Devices
[*] enable uart driver
[*] support uart3 device
(3) cli uart port number
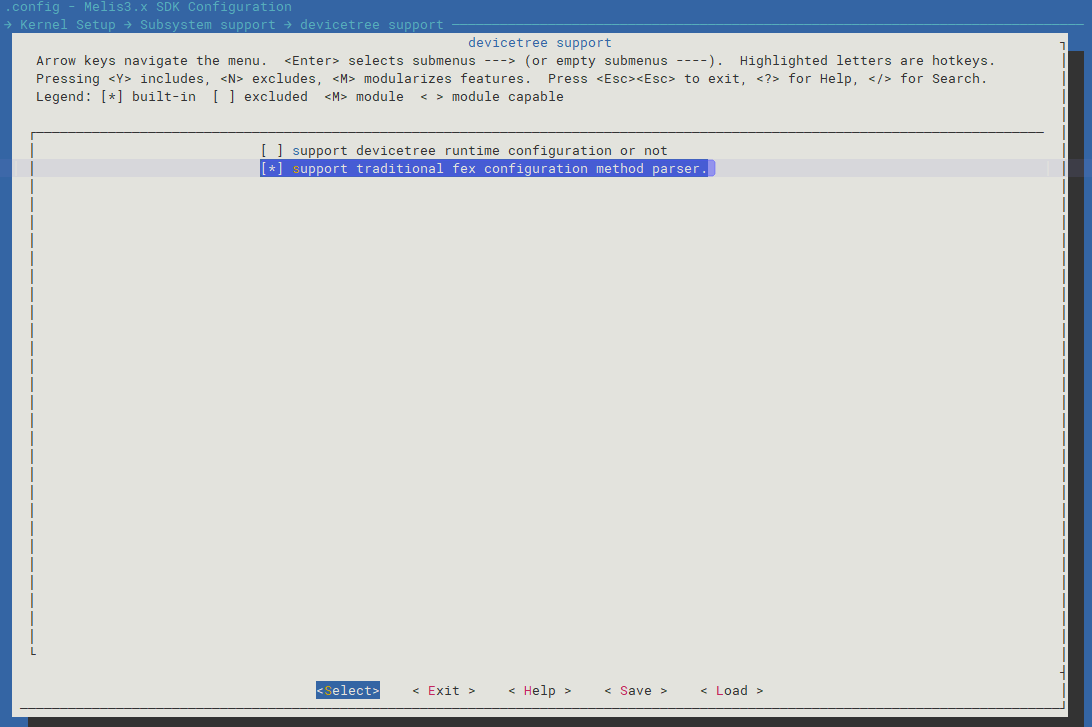
进入如下目录,启用sys_config.fex 解析器
→ Kernel Setup
→ Subsystem support
→ devicetree support
[*] support traditional fex configuration method parser.
保存并退出E907配置。
2.2.4 编译生成新镜像
在workspaces/e907_rtos/rtos/source目录下,输入make
book@100ask:~/workspaces/e907_rtos/rtos/source$ make
CHK include/config/kernel.release
CHK include/generated/uapi/melis/version.h
fatal: not a git repository (or any parent up to mount point /)
Stopping at filesystem boundary (GIT_DISCOVERY_ACROSS_FILESYSTEM not set).
fatal: not a git repository (or any parent up to mount point /)
Stopping at filesystem boundary (GIT_DISCOVERY_ACROSS_FILESYSTEM not set).
fatal: not a git repository (or any parent up to mount point /)
Stopping at filesystem boundary (GIT_DISCOVERY_ACROSS_FILESYSTEM not set).
fatal: not a git repository (or any parent up to mount point /)
Stopping at filesystem boundary (GIT_DISCOVERY_ACROSS_FILESYSTEM not set).
UPD include/generated/uapi/melis/version.h
CHK include/generated/utsrelease.h
CC sysconfig.fex
CC ekernel/arch/common/common.o
LD ekernel/arch/common/built-in.o
AS ekernel/arch/riscv/sunxi/blobdata.o
LD ekernel/arch/riscv/sunxi/built-in.o
LD ekernel/arch/riscv/built-in.o
LD ekernel/arch/built-in.o
LD ekernel/built-in.o
LD [M] ekernel/melis30.o
/home/book/workspaces/e907_rtos/rtos/source/../toolchain/riscv64-elf-x86_64-20201104//bin/riscv64-unknown-elf-ld: ekernel/melis30.o: section .dram_seg.stack lma 0x4803a2b8 adjusted to 0x4803a34c
OBJCOPY ekernel/melis30.bin
RENAME ekernel/melis30.o ----> ekernel/melis30.elf
/home/book/workspaces/e907_rtos/rtos/source/../toolchain/riscv64-elf-x86_64-20201104//bin/riscv64-unknown-elf-strip: ekernel/stWPSq13: section .dram_seg.stack lma 0x4803a2b8 adjusted to 0x4803a34c
text data bss dec hex filename
221280 17132 25488 263900 406dc ekernel/melis30.elf
pack melis
#### make completed successfully (7 seconds) ####
编译完成后会在ekernel目录下生成的melis30.elf。
2.3 检查开发板硬件
经过测试发现在100ASK_V853-PRO开发板上的R36电阻会导致uart3波特率过高,所以需要检查开发板上的R36电阻是否存在,如果存在需要手动去掉该电阻。下图为存在R36电阻的位置情况,红框内即为R36电阻
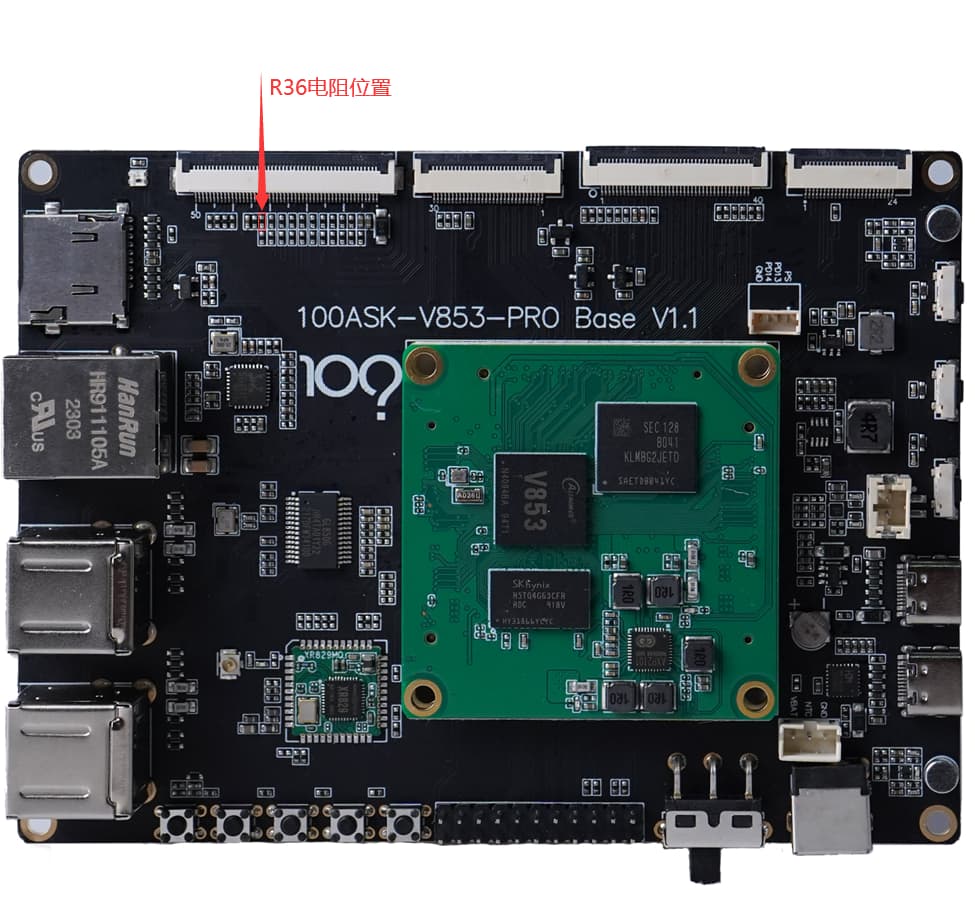
如果电阻存在需要手动去除,下图为去除R36电阻的示意图

去除R36电阻后,即可正常访问uart3串口。
2.4 开发板内使能E907
使用全志烧写工具AllwinnertechPhoeniSuit更新Tina新镜像,详情请参考100ASK_V853-PRO 环境配置及编译烧写
更新完成后,打开串口终端进入开发板控制台,将melis30.elf拷贝到/lib/firmware目录下。
假设我使用ADB功能将文件拷贝到开发板的root/目录下
root@TinaLinux:~# cd /root/
root@TinaLinux:~# ls
melis30.elf
将root目录下的melis30.elf拷贝到/lib/firmware目录下
root@TinaLinux:~# cp melis30.elf /lib/firmware/
root@TinaLinux:~# ls /lib/firmware/
boot_xr829.bin fw_xr829.bin melis30.elf sdd_xr829.bin
etf_xr829.bin fw_xr829_bt.bin regulatory.db
拷贝完成后,可以在/lib/firmware目录下,看到小核固件。
2.4.1 连接开发板的uart3
此时需要使用USB转串口模块,连接我们上面设置的uart3。我们需要找到开发板上的PH0、PH1、GND,分别连接到USB转串口模块的RXD、TXD、GND。100ASK_V853-PRO开发板已经将PH0、PH1、GND引出来,位置图图下所示
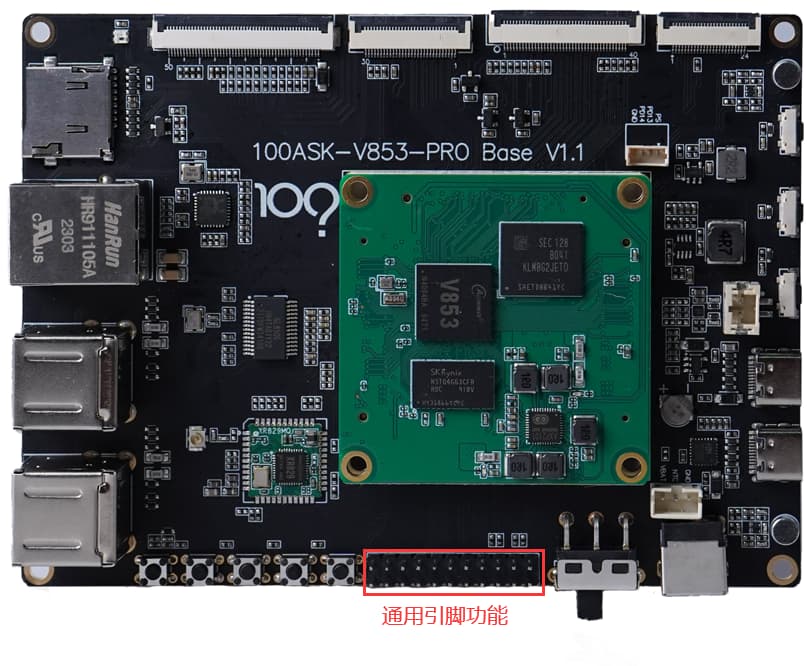
具体的引脚可查看开发板背面的丝印,确认引脚位置。
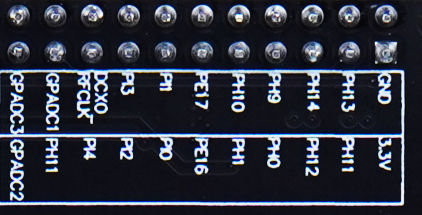
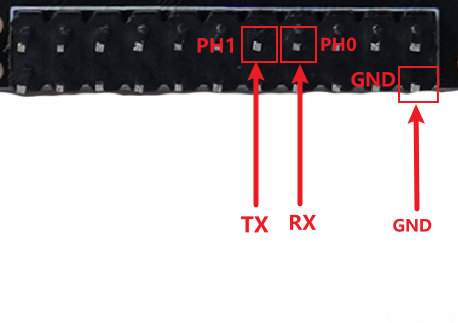
通过背面的丝印可以知道PH0、PH1、GND的位置,如下图所示,PH0、PH1、GND,分别连接到USB转串口模块的RX、TX、GND。
连接完成后将USB转串口模块插入windows主机端后,使用串口软件打开uart3串口界面,波特率为115200。
在Tina Linux开发板串口终端输入
root@TinaLinux:~# echo melis30.elf > /sys/kernel/debug/remoteproc/remoteproc0/firmware
将melis30.elf固件放在硬件节点firmware下,启动E907固件
root@TinaLinux:~# echo start > /sys/kernel/debug/remoteproc/remoteproc0/state
[ 3926.510018] remoteproc0: powering up e907_rproc
[ 3926.515440] remoteproc0: failed to parser head (melis30.elf) ret=-2
[ 3926.522674] remoteproc0: failed to read boot_package item
[ 3926.528930] remoteproc0: request_firmware failed from boot_package: -14
[ 3926.537528] virtio_rpmsg_bus virtio0: rpmsg host is online
[ 3926.543964] remoteproc0: registered virtio0 (type 7)
[ 3926.550538] remoteproc0: remote processor e907_rproc is now up
root@TinaLinux:~# [ 3926.560537] virtio_rpmsg_bus virtio0: creating channel rpbuf-service addr 0x400
[ 3926.569199] virtio_rpmsg_bus virtio0: creating channel sunxi,rpmsg_heartbeat addr 0x401
[ 3926.578725] virtio_rpmsg_bus virtio0: creating channel sunxi,notify addr 0x402
[ 3926.587194] virtio_rpmsg_bus virtio0: creating channel sunxi,rpmsg_ctrl addr 0x403
使能后可以在另一个串口界面看到如下打印信息
|commitid:
|halgitid:
|timever : Thu, 04 May 2023 04:22:23 -0400
scheduler startup
msh >Start Rpmsg Hearbeat Timer
rpmsg ctrldev: Start Running...
按下回车即可进入终端界面。
输入ps即可看见小核进程信息
msh >ps
thread pri status sp stack size max used left tick error
-------------------------------- --- ------- ---------- ---------- ------ ---------- ---
tshell 21 ready 0x000003e8 0x00004000 19% 0x00000008 000
ctrldev 6 suspend 0x00000148 0x00001000 08% 0x0000000a 000
rpmsg_srm 8 suspend 0x000000f8 0x00000800 22% 0x0000000a 000
vring-ipi 15 suspend 0x00000118 0x00002000 03% 0x0000000a 000
rpbuf_init 8 suspend 0x000000e8 0x00001000 12% 0x0000000a 000
standby 1 suspend 0x00000128 0x00001000 07% 0x0000000a 000
tidle 31 ready 0x00000178 0x00002000 04% 0x0000001e 000
timer 8 suspend 0x000000d8 0x00000200 73% 0x0000000a 000
3.双核通信
3.1 E907小核创建通讯节点
在E907小核串口终端建立两个通讯节点用于监听数据,输入eptdev_bind test 2
msh >eptdev_bind test 2
查看监听节点,输入rpmsg_list_listen
msh >rpmsg_list_listen
name listen alive
test 2 0
console 100 0
3.2 大核创建通讯节点
在Tina LInux下也创建两个通讯监听节点,输入以下两个命令
echo test > /sys/class/rpmsg/rpmsg_ctrl0/open
echo test > /sys/class/rpmsg/rpmsg_ctrl0/open
输入后,如下所示:
root@TinaLinux:~# echo test > /sys/class/rpmsg/rpmsg_ctrl0/open
[ 5060.227158] virtio_rpmsg_bus virtio0: creating channel sunxi,rpmsg_client addr 0x404
s/rpmsg/rpmsg_ctrl0/openroot@TinaLinux:~# echo test > /sys/class/rpmsg/rpmsg_ctrl0/open
[ 5061.464758] virtio_rpmsg_bus virtio0: creating channel sunxi,rpmsg_client addr 0x405
在大核TIna Linux中也创建了两个监听节点,输入ls /dev/rpmsg*查看节点信息
root@TinaLinux:~# ls /dev/rpmsg*
/dev/rpmsg0 /dev/rpmsg1 /dev/rpmsg_ctrl0
创建完成后,可以在E907小核终端中查看自动输出的信息。
msh >ctrldev: Rx 44 Bytes
client: Rx 8 Bytes
rpmsg0: binding
send 0x13131411 to rpmsg0
create rpmsg0 client success
ctrldev: Rx 44 Bytes
client: Rx 8 Bytes
rpmsg1: binding
send 0x13131411 to rpmsg1
create rpmsg1 client success
3.3 大核传输至E907小核
在Tina LInux下输入
echo "hello 100ASK_V853-PRO" > /dev/rpmsg0
echo "hello Tina Linux" > /dev/rpmsg1
将Linux Message 0信息通过创建的监听节点传输到E907小核,例如:
root@TinaLinux:~# echo "hello 100ASK_V853-PRO" > /dev/rpmsg0
root@TinaLinux:~# echo "hello Tina Linux" > /dev/rpmsg1
输入后,打开E907串口终端可以发现,大核传输过来的信息。
rpmsg0: Rx 22 Bytes
Data:hello 100ASK_V853-PRO
rpmsg1: Rx 17 Bytes
Data:hello Tina Linux
3.4 E907小核传输至大核
在小核端需要使用命令 eptdev_send 用法 eptdev_send <id> <data>,这里的id号从0开始,我们设置有两个通信节点,所以id号分别为0和1。
在小核的串口终端输入以下命令:
eptdev_send 0 "hello E907"
eptdev_send 1 "hello E907"
例如:
msh >eptdev_send 0 "hello E907"
will send hello E907 to rpmsg0
msh >eptdev_send 1 "hello E907"
will send hello E907 to rpmsg1
输入完成后,小核会将信息分别传入rpmsg0和rpmsg1两个通讯节点。可以在大核Tina Linux端输入
cat /dev/rpmsg0
cat /dev/rpmsg1
可查看从E907小核传输过来的信息。例如:
root@TinaLinux:~# cat /dev/rpmsg0
hello E907
^C
root@TinaLinux:~# cat /dev/rpmsg1
hello E907
^C
按下Crtl+C结束监听前持续监听该节点。
您可以在小核端多次传输信息到该节点,该节点支持持续接受小核传输的信息,例如:
在E907小核,多次传输信息到监听节点rpmsg0
msh >eptdev_send 0 "hello E907 "
will send hello E907 to rpmsg0
msh >eptdev_send 0 "hello E907 "
will send hello E907 to rpmsg0
msh >eptdev_send 0 "hello E907 "
will send hello E907 to rpmsg0
msh >eptdev_send 0 "hello E907 "
will send hello E907 to rpmsg0
msh >eptdev_send 0 "hello E907 "
will send hello E907 to rpmsg0
msh >eptdev_send 0 "hello E907 "
will send hello E907 to rpmsg0
msh >eptdev_send 0 "hello E907 "
will send hello E907 to rpmsg0
在大核端则会一直接收到小核传输过来的信息
root@TinaLinux:~# cat /dev/rpmsg0
hello E907 hello E907 hello E907 hello E907 hello E907 hello E907 hello E907
3.5 关闭通讯
在大核Tina Linux端,操作节点即可,输入以下命令,echo <id>给到rpmsg的控制关闭节点即可
echo 0 > /sys/class/rpmsg/rpmsg_ctrl0/close
echo 1 > /sys/class/rpmsg/rpmsg_ctrl0/close
例如:
root@TinaLinux:~# echo 0 > /sys/class/rpmsg/rpmsg_ctrl0/close
[ 6783.156899] virtio_rpmsg_bus virtio0: destroying channel sunxi,rpmsg_client addr 0x404
root@TinaLinux:~# echo 1 > /sys/class/rpmsg/rpmsg_ctrl0/close
root@TinaLinux:~# [ 6784.224740] virtio_rpmsg_bus virtio0: destroying channel sunxi,rpmsg_client addr 0x405
此时E907小核端也会自动关闭通信节点,自动输出以下信息
send 0x13131411 to rpmsg0
rpmsg0: unbinding
ctrldev: Rx 44 Bytes
send 0x13131411 to rpmsg1
rpmsg1: unbinding